|
|
|
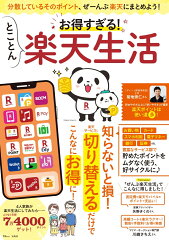
本体製作機関車トーマス?買ってもらいました.  ---------------------------------- 今日のトーマス!(UHG-08LX) 実験用に安いプラスチックのケースを買ってきて加工しました. 車輪もついて,よりトーマスっぽくなってきました. 必要なものを乗せてみたところ↓  横から↓ 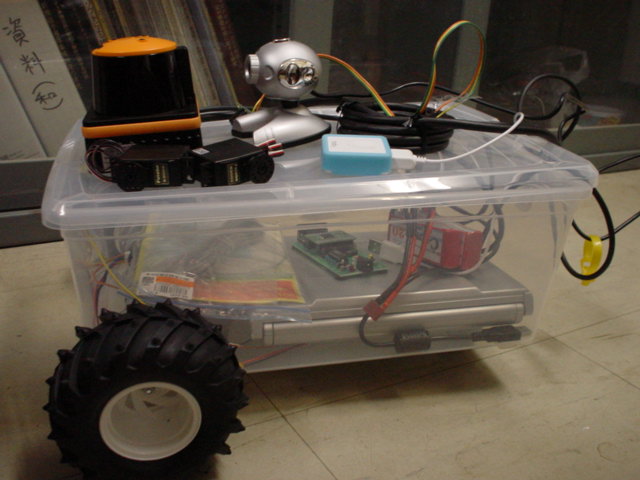 重量オーバーでタイヤが無理してます. 足回りは本番では作り直さないといけなさそう. 今乗ってるのは, ノートパソコン UHG-08LX 測域センサ GPS UBBカメラ 超音波センサ サーボモータ2個(水平取り用) 3Dセンサーモジュールキット(3軸地磁気,3軸加速度,気圧測定(これは不要)) エンコーダ付モータ+ギヤヘッド+ホイール+スパイクピンタイヤ 足回りコントロール用のSH2マイコンボード バッテリー7.4V1900mAh×2 これ全部を連携して動作させれば,それなりに動きそうな気がするんですが・・・ これもぼちぼち進めていきます. 運搬の心配がなければもっと大きくがっちりしたものを最初から作るのですが, 九州から大会に向かうには,スーツケースに収まる大きさで作っておくのが無難です. ---------------------------------- トーマスに問題発覚! タイヤがやわらかすぎるので,空気入れました. といっても,チューブタイヤでもチューブレスタイヤでもないので, こんな感じで梱包用プチプチを詰め込み↓  すると,いい感じで硬くなりました↓  (傾いているのは,カメラが傾いていたせい) 調子に乗って,モータに電圧を加えて前後左右に動かしてみました. 電圧12Vで電圧左右計0.6Aくらい. 単純計算でモータだけなら3時間くらい回せます.(1900mAh/600mA) ところが問題発覚! 前のタイヤの径とやわらかさはいい感じなのでちょっとした段差は楽に超えるのですが, 後ろのキャスターが小さすぎて,写真の程度の段差にひっかかります. とりあえずの実験はできますが,改善の必要ありです. 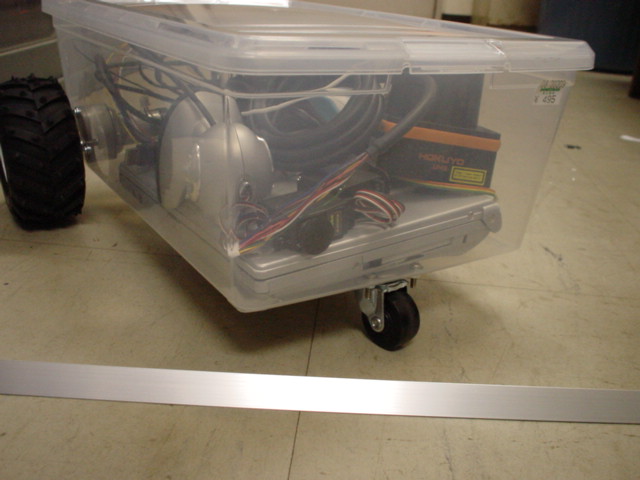  タミヤ ギヤードモーター380K75&130mmピンスパイクタイヤ(2セット)  自在ゴムキャスター 50mm ---------------------------------- トーマスは頭を傾げます. 今日の工作. 斜面で走ることを考えたら,傾きが変わったほうがいいのでこんなの作ってみました. 強度的にはかなり問題ありですが. 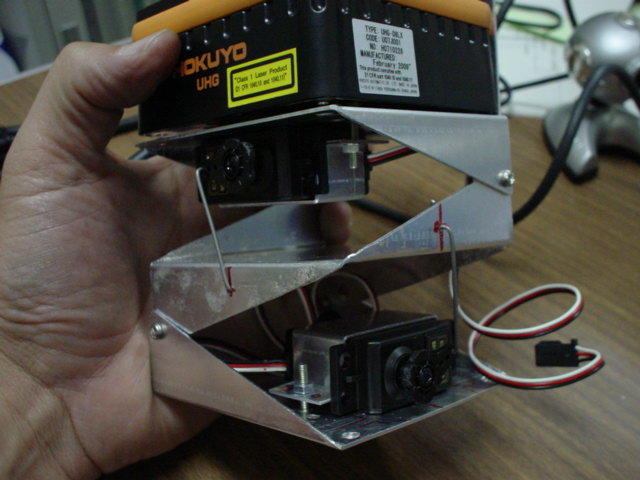 こんな感じで使ってみる予定.  動画はこちら(センサの角度調整). プラケースの蓋の上では動くたびに大きく揺れるので, Lアングルで台を作りました. 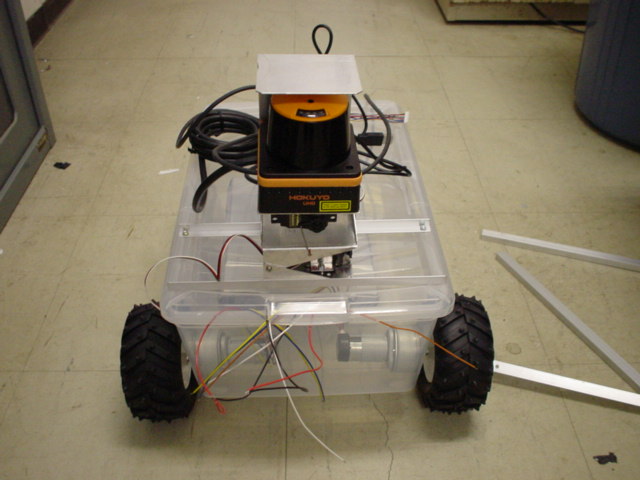 ---------------------------------- 3DセンサーモジュールキットTDS01V 秋月の3DセンサーモジュールキットTDS01VをPCに接続して動かしてみました. これを買ったら,自律移動ロボットを作りたくならない人の方がおかしいですね. 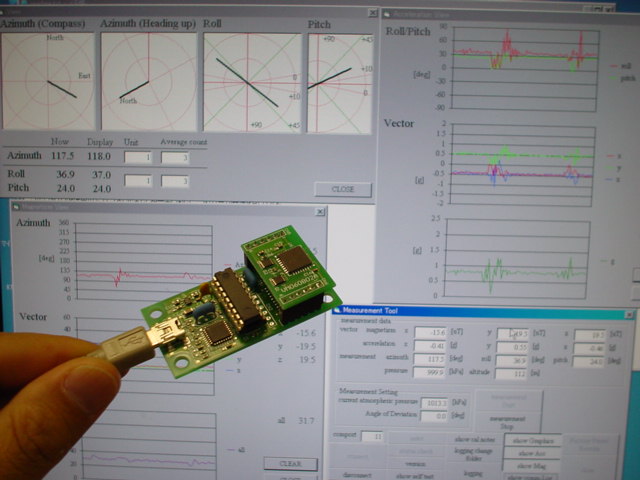 3DセンサーモジュールキットTDS01Vの動画 ---------------------------------- バスパワーメーター 移動ロボットの電源について考えています. 最低4個のUSB機器を接続して搭載する予定なのですが, ノートPCのバッテリーでどれだけ駆動できるかわかりません. USB機器の消費電力も不明なものばかり. 外部電源供給ができるUSBハブを使ったほうがいいのかもしれません. 考えていてもしょうがないので・・・ USB延長ケーブルをばらして,  バナナプラグを半田付け. (赤,黒,青,白とシールドのうち,赤が+5V.)  ビニールテープで巻いて,バスパワー測定ケーブルの出来上がり.  早速,USBマウスの消費電流を測定してみると25mAくらいでした. 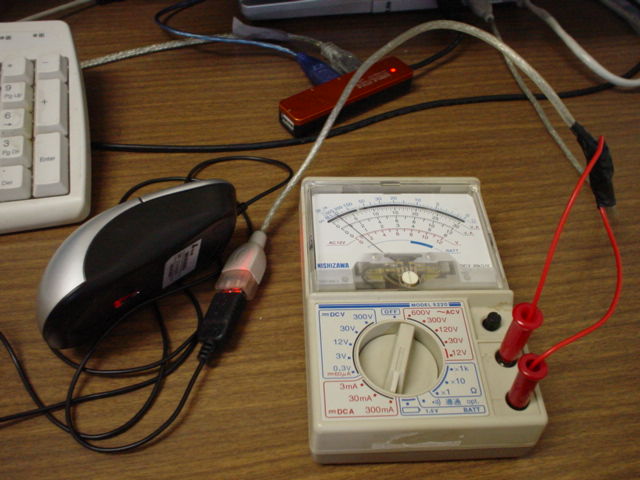 そのほか,接続予定の機器をいくつか測定してみると,大きいものでも120mA程度. 手持ちのGPSの2種類のうち,一つは220mAも電流が流れましたが,これは内蔵バッテリー の充電をしているもよう.単三電池形のGPS(m-241)は90mA. というわけで,バスパワータイプのハブで十分そうです. ---------------------------------- DE004 Sabertooth 2X10 デュアルモーターコントローラー 注文していたメカロボショップのモータコントローラが届きました. メカロボショップへのリンク→DE004 Sabertooth 2X10 デュアルモーターコントローラー 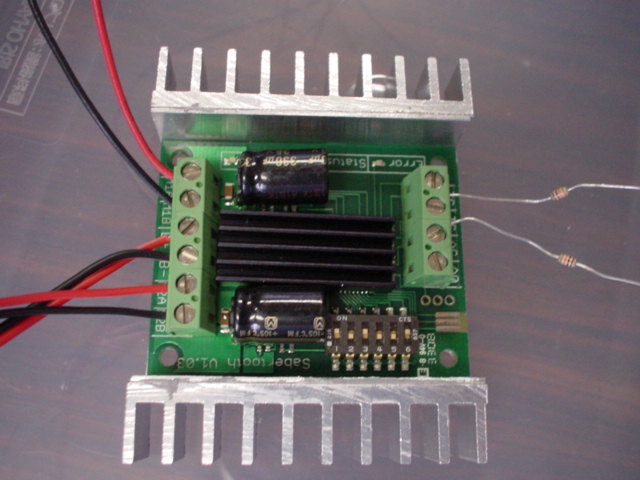 早速接続してモータを回してみました. 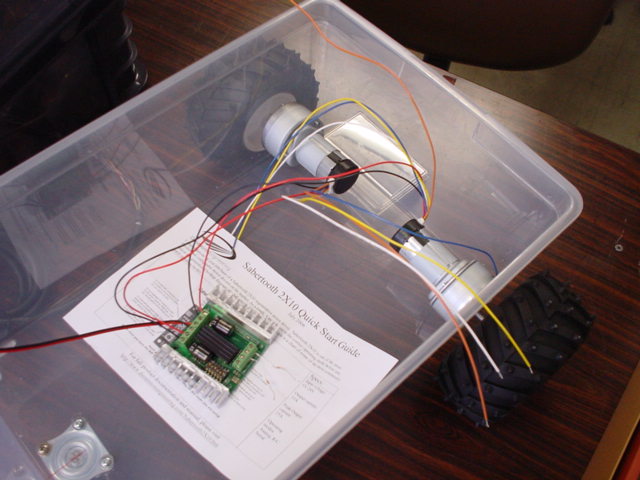 アナログコントロールは,0V逆転,5V正転,2.5Vで停止. 抵抗分割で作った2.5Vできっちり停止してくれたのでマージンを取ってあるようです. 2本のデジタル出力からボリュームを使った抵抗分割で信号を作れば簡単に制御できそうです. 他の信号入力も試してみましたが,結局,シリアル入力が今回は都合が良さそうです. S1入力にコード化した信号を送ると左右のモータをコントロールできます. ---------------------------------- マイクロシリアルサーボコントローラ(SSC03A)のテスト メカロボショップで売っている,マイクロシリアルサーボコントローラ(SSC03A) を使ってみました. 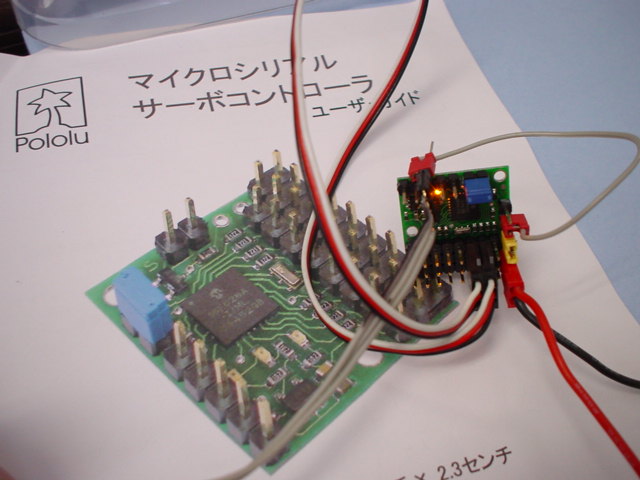 秋月のUSB-シリアル変換を使ってロジックレベルシリアル信号をPCから供給. 電源は,ボードにVCC-Vsjumperを追加して,サーボ用電源から供給して単電源動作. プロトコル選択はジャンパーをつけたままにして,ミニSSC2モード. サーボ1とサーボ2にサーボを2つ接続しました. この状態で,PCからシリアルで3バイトデータを送るとサーボが動きます. 1バイト目はFFで固定,2バイト目はチャンネル数,3バイト目はサーボ位置. 通信にはVectorでダウンロードしたシリアル通信テスタ,Seristerを使いました↓ http://www.vector.co.jp/soft/win95/hardware/se423507.html 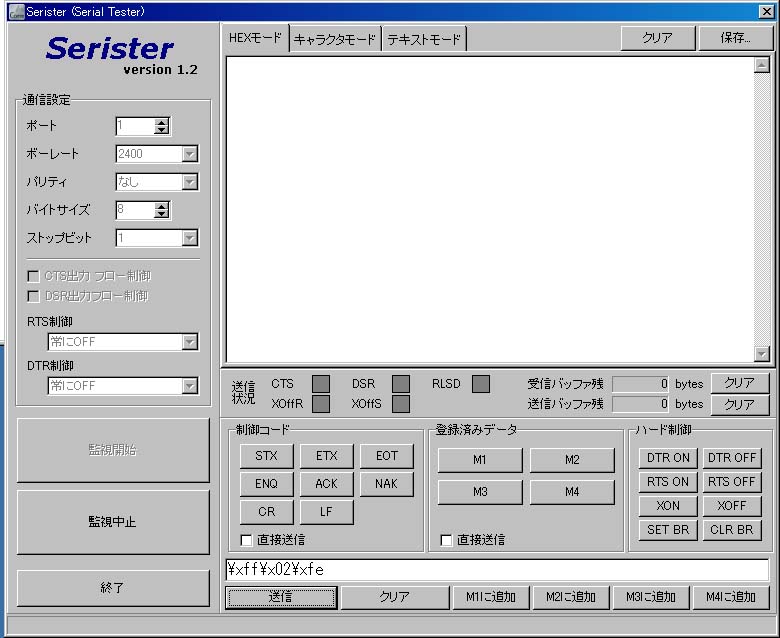 先日作ったレーザレンジファインダの傾き制御に接続したところ↓ 2つのサーボがそれぞれ制御できました. 注意しないといけないのは,サーボが動くときに電圧が下がってコントローラが 誤動作することがあります.電源には十分な電流能力のあるものを使うか, コントローラとサーボは別電源にしたほうが安全です. 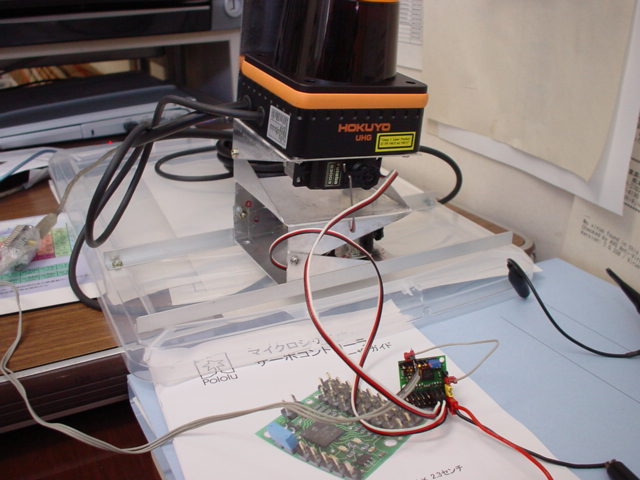 ----------------------------- 北陽電機 レーザ式測域センサ UHG-08LX 昨年度末に購入したのをやっと動かしてみました. DC12VをつないでUBS接続して,ドライバとサンプルをダウンロードして動作確認. こんな感じでサンプルが動きます↓ 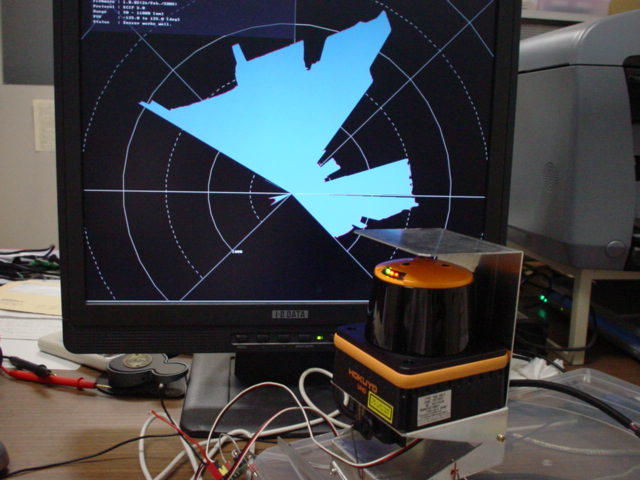 手をかざすと,指の間隔までバッチリ取れます↓ 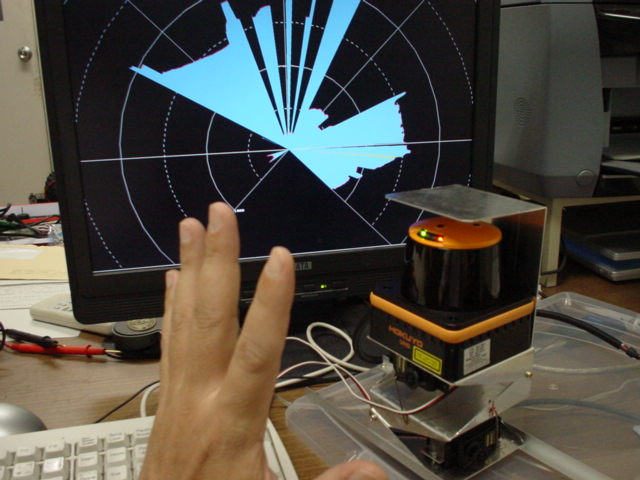 動画はこちらー>UHG-08LX 楽天から,4mまでのセンサが購入できます↓  ☆ 2009-03-17 北陽電機 レーザ式測域センサ URG-04LX ---------------------------------- ちょっと回路を製作中 購入した部品を組合わせて動かすだけの回路を製作中.  みんな大掛かりな物を作ってるのに, こんなんでチャレンジできるんだろうか・・・? ---------------------------------- ジャパンロボテックのエンコーダ付モータ エンコーダを動かしてみました. ピンNo. 1 Vcc DC5V 橙 2 GND 青 3 DC12V(-) 黒 4 DC12V(+) 赤 5 B相 黄 6 A相 白 のようです. エンコーダ出力はオープンコレクタなのでプルアップが必要. テスト接続↓ 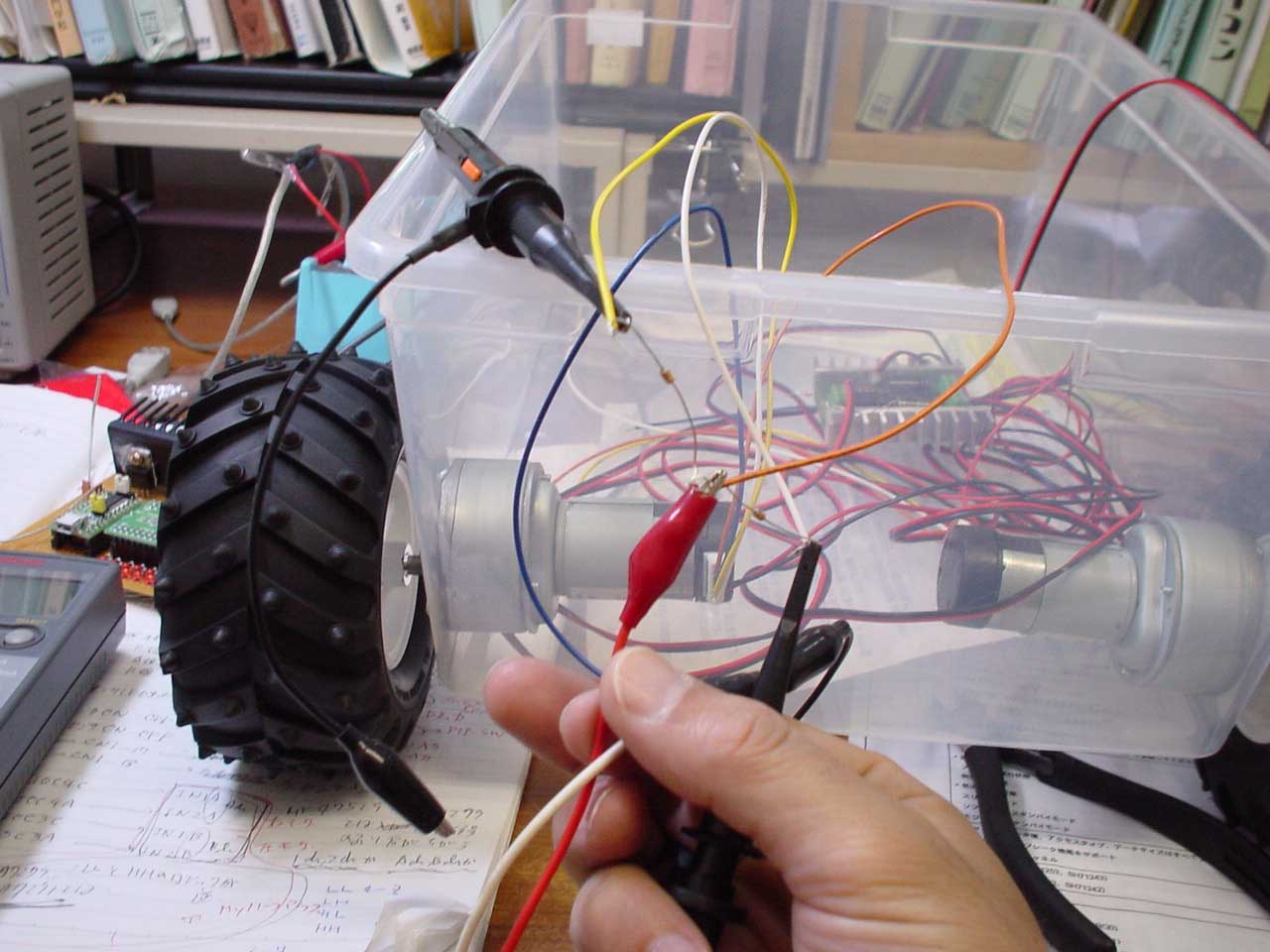 波形↓ 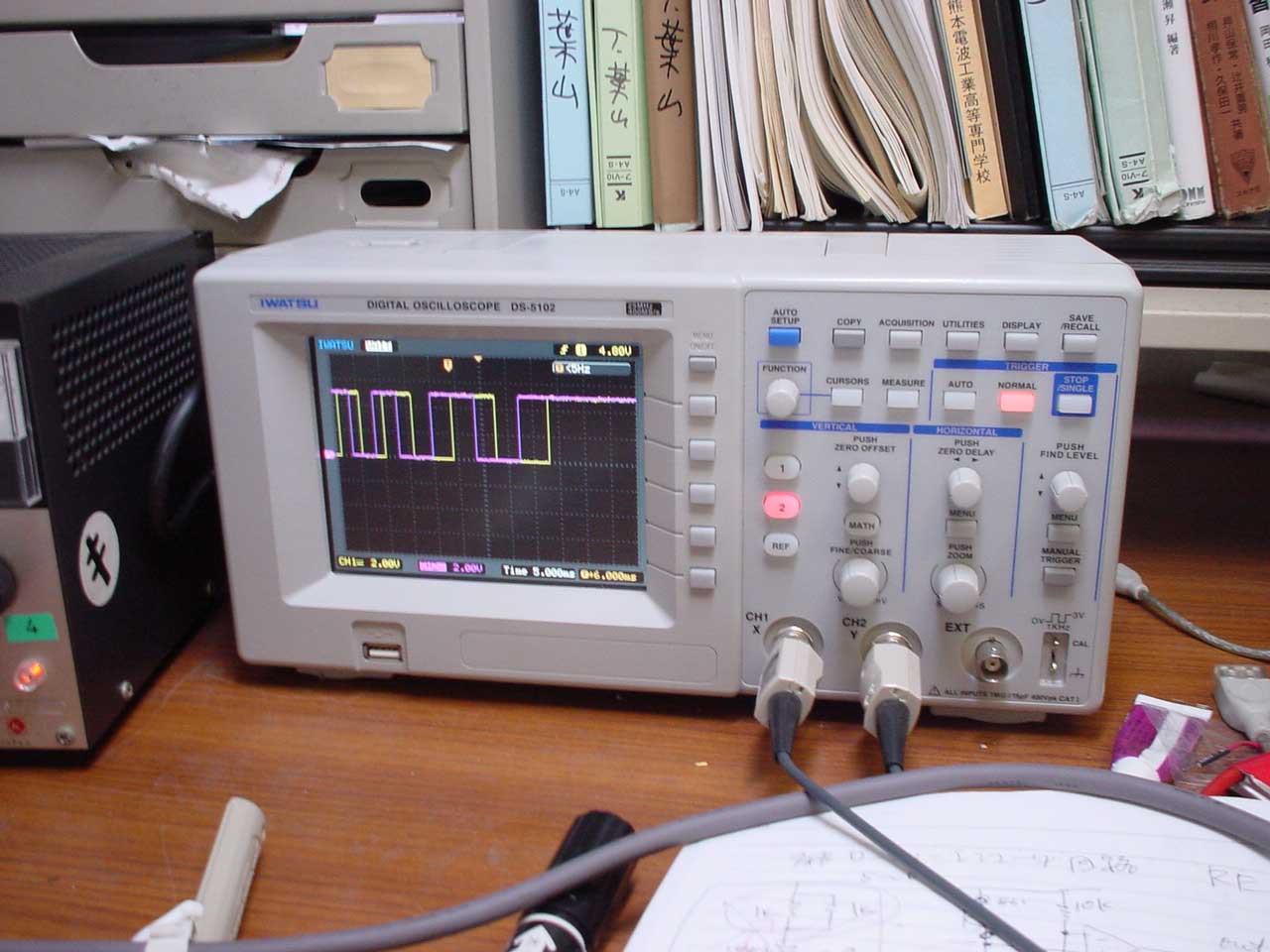  12パルスエンコーダ付DCモータ(RDO-29BMA) ---------------------------------- つくばチャレンジのハードの試作が大方完成 こんな感じです↓ 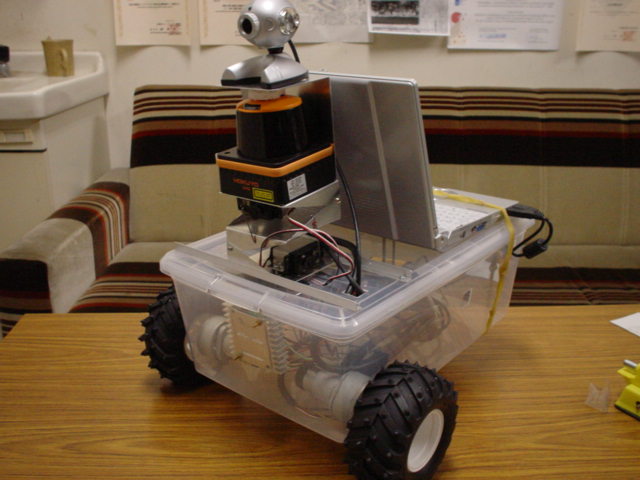  回路はこんな感じ↓ 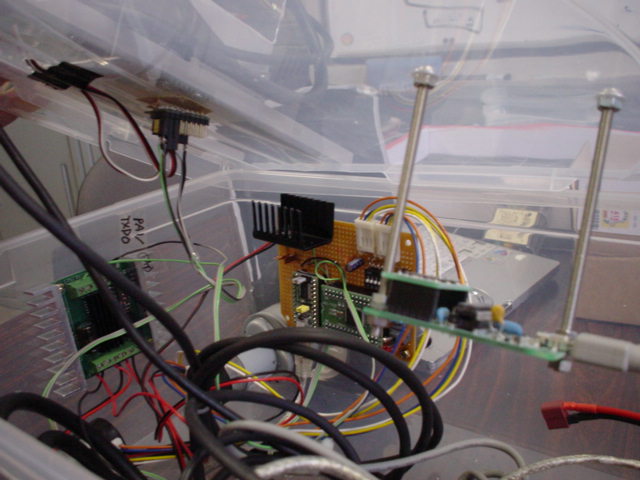 蓋の裏側にネジで中空に固定されているのは3軸センサ. 同じく蓋の裏にサーボコントローラ. 前面に取り付けてるのはモータドライバ. 右側面がSH2-7125基板. 基板はこんな感じ↓ 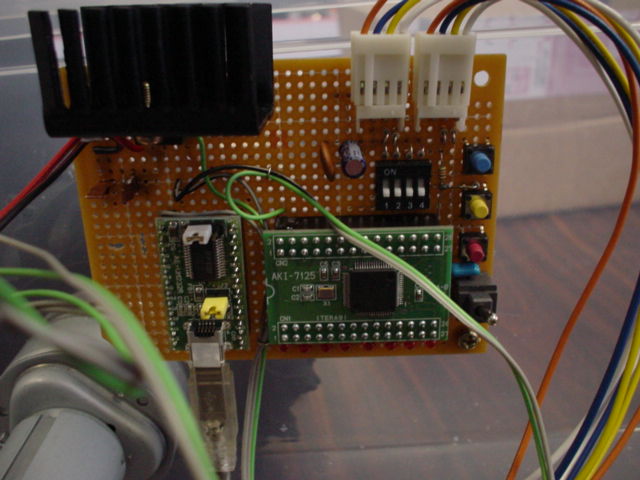 USBシリアル変換とAKI-7125とDIP-SW,LEDなど. うまく動くかな? ---------------------------------- つくばチャレンジ試作ロボット,バッテリー ちょっと高いですがこれを使います. LIPO 11.1V, 1900mAh, 182g 重量増加で足回りを強化するより軽さで勝負.  充電時が約12Vになりますので,そのまま測域センサとモータコントローラを介して モータにつなぎます. 左右モータが回って400mA位流れますので,約4.5時間くらいの走行はできます. 楽天で買えるのは↓  リチウムポリマーバッテリーTP2100-3SPL  リチウムポリマーバッテリー 11.1V 1800mAh (20C) ---------------------------------- Top-URG つくばチャレンジ用のモニタを申し込んで,貸し出ししていただきました.  箱が妙に軽いと思ったら,UHG-08LXと比べて一回り小型軽量です.  取り付け穴の配置や電源コネクタが違うのでちょっと加工してから入れ替えてみます. ---------------------------------- 緊急停止スイッチ つくばチャレンジのロボットには緊急停止スイッチが必要なので,買いました. この辺につけます.これでモータの電源切ります. 人にぶつかったらロボットの方が壊れそうなくらい弱いプラケースボディですが.  非常停止スイッチ取り付け. 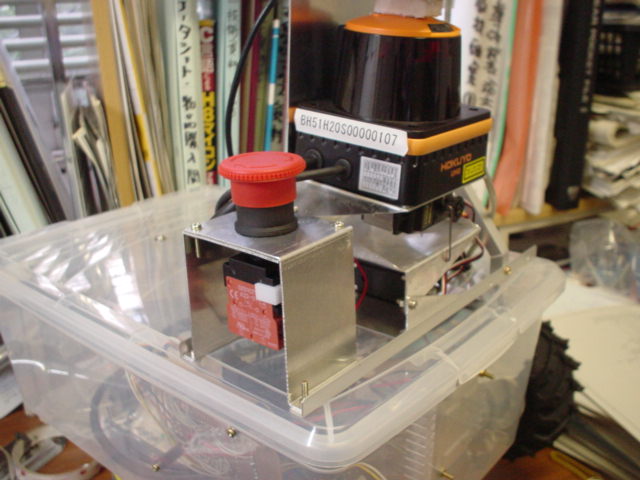 ---------------------------------- つくばチャレンジのロボットちょっと改造 昨日の半田付けで散らかってソフトを作る感じではなかったので, つくばチャレンジのロボットをついでにちょっと改造. といっても,これまでコネクタを抜き差しして動かしていたところに スイッチをつけました.実はメインスイッチもなかったのです. こんな感じ↓  ---------------------------------- UTM-30LX つくばチャレンジのロボットに,貸し出しして頂いたUTM-30LXを取り付けました.  あとゼッケンも4方向に貼り付け. ---------------------------------- 黄緑色のGPS 黄緑色のGPSを借りてきました. でも,使い方が分かりません・・・  <追記> 黄緑色のGPS,動き出した模様. もう日にちがないけど,GPS乗せ換え,重量増. これで搭載物は150万超え. ボディは500円のプラ衣装ケース,おいおい. ---------------------------------- ホームセンターでお買い物 つくばチャレンジのコース中に小型のキャスターでは引っかかりそうな場所があるので, 大き目のボールキャスタ2種類.  こんな感じで取り付ければ,側溝の溝くらいなら大丈夫でしょう.  しかし,もう一つ買おうと思ったものはありませんでした. GPSアンテナ取り付けのためのボルトは5/8インチだそうで,よほど大きな店でないと 置いていないようです. 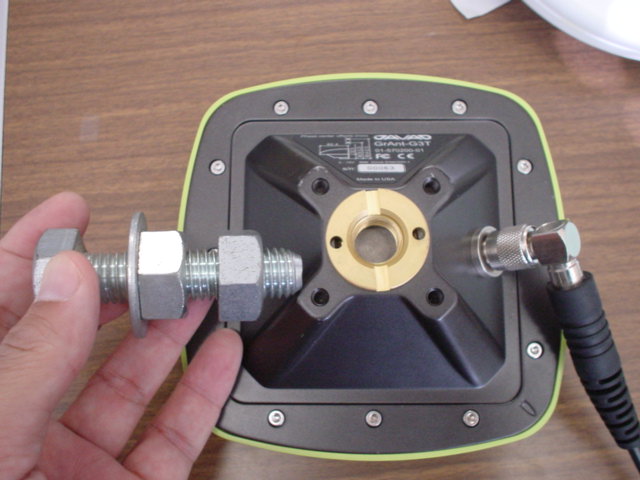 ---------------------------------- 電源の配分 いろいろ考えたけど, GPS電源0.3-0.4A ->Lipo, 7.4V, 900mAh or 1900mAh (手持ちがこの2種類) 走行に必要な消費電流は主にLRFとモータで0.8A位 ->LiPo,11.4V,1900mAh(1本あり,もう1本予備を買うお金なし) にしようかと思う. で,ケーブル作って今日は終わり. ---------------------------------- 電源の実験 ロボットを台に乗せて車輪はフリーにして,マップ上を走行させてました. 走行時間は,約1.5時間. LiPo,11.4V,1900mAhフル充電状態から電池電圧は,12.3V->11.1Vまで低下. GPSは現在実験中. ---------------------------------- つくばチャレンジ2009,今日の工作 5/8インチのネジと言うのは結構売ってないもので,ホームセンターを数軒回ってやっと購入.  ねじ山を壊さないようにダブルナットで固定して加工.  こんな感じにできました.  ロボットに取り付け  アンテナ取り付け.黄緑色のは重いのでもう一つ借りた軽い方  目玉オヤジが傘を差してるみたいです. ジャンル別一覧
人気のクチコミテーマ
|