|
|
|
自転式飛行体の製作飛行体,その1昨年度作り始めたけどちょっと不具合があって途中で止まってる飛行体の製作. 再起動のきっかけ作りに写真と初期のテスト動画アップ. 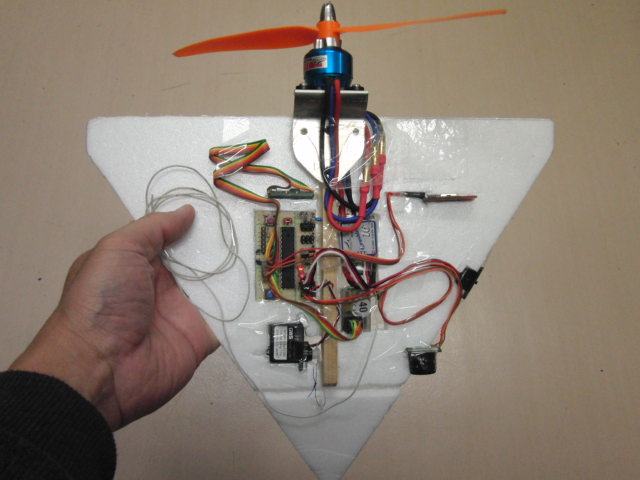 安定性のテスト飛行動画 ----------------------------------------- 自転式飛行体、高度100m超まで上昇 自転しながら飛ぶ飛行体を作りました。地磁気センサで向きを検出しRC信号とミキシングして回転しながらでも操縦できるようになってます。 スロットル、尾翼の2自由度で操縦。(ほか、ジャイロによるスタビライザーあり) GPSを搭載して自律飛行を目指しプログラムまでは組んでますが、まずはRC操縦しています。 温度センサを搭載し、GPSで計測した高度に対する温度計測をおこなってみました。獲得高度は106m。下ろすとき急にスロットルを戻したので頭が下を向いてしまい制御不能に、落下させてしまいましたが、グランドのほぼ中央で上げていたので敷地外に落ちることはなく、プロペラの破損だけですみました。 残念ながら、三脚たてて撮影したので、カメラが追っていないのと、ピンぼけに気づきませんでした。 動画-> 自転式飛行体、高度100m超まで上昇 ----------------------------------------- 自転式球形飛行体のベース、試験飛行 円板を2枚組み合わせた球形飛行体にして機体をプロペラガードにして安全性を高めました。 マイコンを組み込む前の安定性を見てる動画。スロットル操作だけでおおよそ同じ範囲で漂っています。リポ400mAh3セルで7分弱回しっぱなしです。 安定性も安全性もあり作りやすいので、この形をデフォルトにしようと思います。 その動画→ 自転式球形飛行体のベース、試験飛行 --追記-- マイコン搭載完了! 自転式球形飛行体、尾翼の制御 を動画に撮影しました。 飛行中に機体が回転するのですが、機体の回転に合わせて尾翼を同一方向に傾けることにより任意の方向への移動を可能とします。 ----------------------------------------- 自転式の球形飛行体、マイコンを使って横方向の操縦 東西南北の方位に対して操縦します。行きたい方向に対して旋回しながら動き出すので、操縦性は今ひとつですが。操作を間違って画面からはみ出してる時間が多くてすみません。 もう少し自転を速く機体を作ると、あまりブレなくなると思います。 その動画→自転式の球形飛行体、マイコンを使って横方向の操縦 ----------------------------------------- 自転式の球形飛行体、自律飛行その1 球形にする前に、GPSによる水平面内の位置制御はおおよそ作ってるので、完全自律化を目指して今度はスロットル制御。超音波センサを取り付けて、一定高度になるようスロットルの調整を加えてみました。 手で支えて動かした範囲だとプログラム的には問題なさそうですが、超音波センサの読みが安定しないので時々大きく振られます。センサの性能上振れるのは仕方ないとして、それでも飛ぶのか、振れが大きすぎて飛ばないのか?スムージングを強めたとしてレスポンスが間に合うのか?広いとこで飛ばしてみないとわからない感じです。 ----------------------------------------- 自転式の球形飛行体、自律飛行その2、スロットルON-OFF制御 適当にPIDで飛ばそうとしたら失敗して落としてしまったので、まずはスロットルを適当なHigh-Lowの2レベルを高さを決めて切り替えて挙動を確認。遅れの影響で結構上下にふれます、という実験動画。細かいことでも記録してアップ、ブログですから…。 その動画 ----------------------------------------- 自転式の球形飛行体、自律飛行その3,スロットルをPID制御 最初にラジコンで浮かない位にスロットルを入れて、手を離すと設定した高さ以下でPID制御が始まる。最初の設定レベル以上で制御し、Iがマイナスにならないよう制御範囲を限定して墜落を避けました。Dの効きが弱い、Iが強すぎ?のようですが、係数を調整すれば安定しそう。 その動画→ 自転式の球形飛行体、自律飛行その3,スロットルをPID制御 -追記- パラメータをちょっと変えたらいい感じになりました。次はホバリングから徐々に高度を下げて着陸させてみます。 ----------------------------------------- 自転式の球形飛行体、自律飛行その4,スロットルを完全自律 しばらく更新してませんでしたが、自転式の球形飛行体のスロットル制御に結構手間取ってました。手動でほぼホバリング状態にスロットルを持ってきてその前後の制御をさせた時にはそこそこ安定するのですが、I制御でスロットルを0から自動であげていこうとするとブレが大きくてまともに制御できませんでした。 原因は、超音波センサにあり、アナログ値で読み取ると不連続に大きなノイズが入るので、これをなんとかしないと制御ができません。 かなりの比率でスムージングして、不連続なノイズは条件判断で抑えこんで、やっと安定した距離が取れるようになりましたがレスポンスがかなり遅れるようになりました。 それに合わせてP制御とD制御の係数を下げて、やっとI制御でじわっと上昇して高度ほぼ一定でホバリングできるようになりました。 約20秒ホバリング、10秒かけて下降、停止するプログラムで飛ばした動画 ----------------------------------------- まだまだ続きます・・・ ジャンル別一覧
人気のクチコミテーマ
|






