|
|
|
|
2009.08.07
カテゴリ:二足歩行ロボット
ロボットの研究・開発といっても、僕がやっているのは、 単なるものづくりの延長線上でしかないので、 普段は数式とか、計算とかそういう、論理的なことは 全くしません。。。 毎日、トライ&エラーの繰り返しで、試行錯誤でやってます。 ですが、今日はちょいと計算をしてみました。 簡単なエクセルを使っただけですが。 ロボットの電圧変化について調べてみました。 これは、日ごろから疑問に思っていた事なのですが、 実際のところバッテリーはどのくらいもつのか、とか 電圧が降下してもモーションは安定しているのか が、知りたかったのでやりました。 調査結果は、簡単に言うと”意外にも長時間動く!”事です。 自分の中では、せいぜい10分が限界というイメージでしたが、 17分経過しても電圧はモーター適正電圧の10.8Vを下回りませんでした。 尚、バトル時に使う基本移動モーションの連続再生という条件下で 調査を実施。 1回目は、ギリギリまで測定しましたが、2回目、3回目は、 11.1Vを下回るまで測定。 グラフにすることによって、電圧の変化のしかたもよく分かります。 11.3V付近から、結構持つこともわかりました。 □ロボット動作時の電圧変化□ ここでは、平均値だけを紹介。 同じ条件下で、計三回測定の平均値。 1分後11.90 2分後11.81 3分後11.71 4分後11.59 5分後11.49 6分後11.40 7分後11.32 8分後11.25 9分後11.19 10分後11.13 ※実際には表にまとめたが、ここでは簡略表記とする。 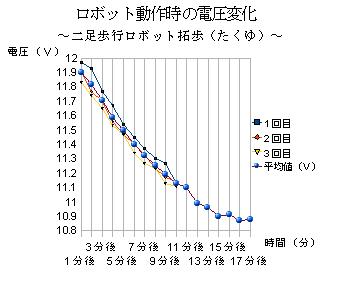 お気に入りの記事を「いいね!」で応援しよう
Last updated
2009.08.07 23:49:49
コメント(0) | コメントを書く
[二足歩行ロボット] カテゴリの最新記事
|
|







