|
|
|
ハードウェアとソフトウェアソフトの大枠も出来て,ハードと接続して動作確認.GPSの受信をしながら自動航行のためにサーボとモータを制御. R/Cで強制割込み操縦. Bluetoothを使ったシリアル通信でコマンド動作. あとはユニバーサル基板に組んで,ボートに乗せてプログラムの調整. できたら実地試験.江津湖か有明海へGo! 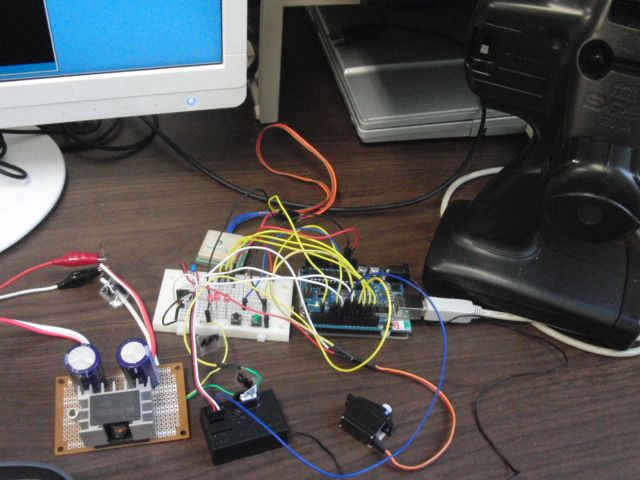 ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ソフトウェア 作成中 メモ. ソフトウェアシリアルでGPSを受信する ハードウェアシリアルでBluetoothを使ってコマンド操作する ソフトウェアシリアルでGPSの文字列を待つ. GPSは1秒おきに数行のデータが出力されるので,1秒以上拘束されない. 1行ごとに拘束から抜けて処理できる. 数行中の必要な行”GPRMC"が受信されたときに,必要なデータを抜き出して航行制御. それ以外の行では処理を重たくしないようにしないと誤動作. RCにより強制操縦できるように,RCをモニタ. RC信号のモニタをpulseInを使って行うと,処理が拘束されるので,RC信号モニタはPICにやらせる. PICがRC操縦の有無を1ビットのHI,LOWで出力するので,これをArduinoで受けて,航行制御,RC受信を切替える. ハードウェアシリアルによるBT通信はソフトウェアシリアルに1秒の数分の1待たされる(1秒に数行なので) BTによるコマンド受信はバッファ内に収まる文字数で送っておくと,拘束を抜けてから受信処理される. 航行中は,GPSによる航行制御またはRC操縦,BT通信,を繰り返す. // ***************************************************************************** #include < Servo.h> #include < EEPROM.h> #include < SoftwareSerial.h> // ライブラリの導入 #include < math.h> // atn,pow関数用 // デジタルピンの定義 #define rxPin 2 // ソフトウェアシリアルポートのRX #define txPin 3 // ソフトウェアシリアルポートのTX #define SET 4 // セットスイッチ,デジタル入力 #define START 5 // スタートスイッチ,デジタル入力 #define RUD_RCV 6 // ラジコン受信 ch1 ,どちらかをPICのGP1へ #define MOT_RCV 7 // ラジコン受信 ch2 #define RC_MON 8 // ラジコン送信機のON-OFFモニタ用,PICのGP2より #define RUD_SRV 9 // サーボ出力 ラダー #define MOT_OUT 10 // サーボ出力 DCDC出力のON-OFF #define LED0 11 // 表示用LED(PB3) #define LED1 12 // 表示用LED(PB4) #define LED2 13 // 表示用LED(PB5) #define DEF_WR 2 // ウェイポイントの半径 #define DEF_KS 0.2 // ラダー切れ角比例係数 #define RUDMIN 10 // ラダー右最大切れ角 #define RUDMAX 170 // ラダー左最大切れ角 #define POSC 90 // 停止時のサーボの制御値 #define PI/2 1.5708 // 3.14159/2 #define PI/180 0.01745 // 3.14159/180 // char strA[20]; // Android等Bluetooth通信用文字列バッファ char str[100]; // GPSほか読み取りのための文字列バッファ char *cmd1, *cmd2; char *latitude,*longitude, *knot, *direct; char latitS[12],longitS[12]; double latit, longit, kn; // 緯度,経度,ノット保存用の変数 // ウェイポイント設定(基準点からのN,E方向への座標) // 最高8ポイント(LEDの表示可能範囲より),座標はあらかじめ定義 double wy[] = { 3257.0666, 3252.6122, 3252.6122, 3252.6122, 3252.6122, 3252.6122, 3252.6122, 3252.6122}; double wx[] = {13040.5495,13044.9423,13044.9423,13044.9423,13044.9423,13044.9423,13044.9423,13044.9423}; int wp=7; // wp:0-7までウェイポイントの数 -1 int np=0; // 目標ポイントナンバー float wr=DEF_WR; // ウェイポイントの半径 float ks=DEF_KS; // ステアリング切れ角比例係数 // 走行処理関係変数 double gy, gx; // 北緯,東経を原点からの距離(メートル)に数値化 float ry, rx, rv, rd; // 北緯(正規化),東経(正規化),速度(ノット),方向(単位:度)の数値化 float dy, dx, dr, dd; // ウェイポイントに対する北緯,東経の差分(m),距離の差分,方位の差分 int pmode=0; // プログラムモード(メインメニューで分岐) int pwRud, pwMot; // パルス幅記録用変数 int posRud=90; // サーボ,アンプコントロール用 int motor=0; // 0:モータストップ,1:自動制御(0,1ともRCは可) // ラダーサーボ制御用オブジェクト生成 Servo rudder; // ソフトウェアシリアルポートを設定 SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin); //-------------------------各種関数定義---------------------------------------- // ソフトウェアシリアルで文字列受信.受信がなければ待ち続ける void recvStrS(char *buf) { int i = 0; char c; while (1) { c = mySerial.read(); buf[i] = c; if (c == '\n') break; i++; } buf[i] = '\0'; // \0: end of string } // ハードウェアシリアルで文字列受信. void recvStr(char *buf) { int i = 0; char c; while (1) { if (Serial.available()) { c = Serial.read(); buf[i] = c; if (c == '\n') break; i++; } } buf[i] = '\0'; // \0: end of string } //-------------------------------------------------------------------------- // GPSによる航行 //-------------------------------------------------------------------------- void run_gps(){ recvStrS(str); // ソフトウェアシリアルで文字列受信.受信がなければ待ち続ける if(strcmp(strtok(str,","),"$GPRMC")==0){ //if RMC line strtok(NULL,","); strtok(NULL,","); latitude=strtok(NULL,","); //get latitude strtok(NULL,","); longitude=strtok(NULL,","); //get longtude strtok(NULL,","); // E読み飛ばし knot=strtok(NULL,","); // 速度読み出し direct=strtok(NULL,","); // 進行方向読み出し strncpy(latitS,latitude,strlen(latitude)); // 実数化すると桁落ちするので表示用に文字列を保管 strncpy(longitS,longitude,strlen(longitude)); latit=atof(latitude); // 文字列を実数に変換.有効数字が足りないので1m弱の誤差がでる. longit=atof(longitude); // 文字列を実数に変換.有効数字が足りないので1m弱の誤差がでる. kn=atof(knot); rv=kn/2; // ノット単位をメートル単位に変換(正確には*0.51) rd=atof(direct); // 方位を数値変換 // 緯度経度の数値変換,絶対位置で表す場合 dy=(wy[np] - latit ) *1860; dx=(wx[np] - longit)*1560; dr=sqrt(pow(dy,2)+pow(dx,2)); dd = atan(dx / dy); // 北に対する角度を求める(±π/2範囲) dd=dd*57; // ラジアン->度に変換 dd*(180/pai) // 0-360度に変換 if (dx > 0 && dy < 0) dd = 180 + dd; else if(dx < 0 && dy < 0) dd = 180 + dd; else if(dx < 0 && dy > 0) dd = 360 + dd; else; // 方位偏差の計算し,現在の進行方向から±180度の範囲に直す dd=dd-rd; if (dd > 180) dd=dd-360; else if (dd < -180) dd=dd+360; // 角度差に応じて方向に舵を切る.速度により値を可変? posRud=POSC-dd*ks; posRud=constrain(posRud, RUDMIN,RUDMAX); // 切れ幅を制限する // ウェイポイントとの距離を求め,ポイント更新または走行終了判断 if (dr < wr){ posRud=POSC; if (np < wp) { np++; Serial.print("np: "); Serial.println(np); } } dispLED(np); // ラダー,スロットルを動かす rudder.write(posRud); // ラダーは航行中動かしっぱなし if (np < wp){ pinMode(MOT_OUT, OUTPUT); digitalWrite(MOT_OUT,LOW); // R/C端子を短絡状態でモータ回す } else { pinMode(MOT_OUT, INPUT); // 走行終了してたらモータ止める } } } //-------------------------------------------------------------------------- // RCによる航行 //-------------------------------------------------------------------------- void run_rc(){ pwRud=pwMot=0; // パルス幅の読み取り値の初期化 pwRud=pulseIn(RUD_RCV,HIGH,20000); // ch1の読み取り,信号がなかったら最大20mSのタイムアウト待ち pwMot=pulseIn(MOT_RCV,HIGH,20000); // ch1の読み取り,信号がなかったら最大20mSのタイムアウト待ち // -------------- ラダーを動かす -------------- posRud=map(pwRud, 500,1500, 0, 180); // パルス幅をサーボ制御値に変換 rudder.write(posRud); // ------- モータ動かす.パルス幅が規定値以上ならモータON,それ以外ならOFF ------- if (pwMot < 1000){ pinMode(MOT_OUT, OUTPUT); digitalWrite(MOT_OUT,LOW); // R/C端子を短絡状態 } else pinMode(MOT_OUT, INPUT); // R/C端子を絶縁状態 } //-------------------------------------------------------------------------- // Bluetoothによる外部機器との通信.例えばAndroidによるデータの送信など. //-------------------------------------------------------------------------- void BT_com(){ // ハードウェアシリアルで文字列受信,受信がなければ抜ける if (Serial.available()) { recvStr(str); cmd1=strtok(str,", "); cmd2=strtok(NULL,", "); Serial.println(cmd1); Serial.println(cmd2); // ”ALL”コマンド:GPS航行にかかる数値を全て出力 if(strcmp(cmd1,"ALL")==0){ Serial.print("latitude "); Serial.println(latitS); // 実数化したものは桁落ちしてるので, Serial.print("longitude "); Serial.println(longitS); // 文字列で表示 Serial.print("knot "); Serial.println(kn); Serial.print("direct "); Serial.println(rd); Serial.print("dx "); Serial.println(dx); Serial.print("dy "); Serial.println(dy); Serial.print("dr "); Serial.println(dr); Serial.print("dd "); Serial.println(dr); Serial.print("rv "); Serial.println(rv); } // ”SENS”コマンド:指定センサ(引数:0-5)または全センサ(引数6以上)の測定値を出力 if(strcmp(cmd1,"SENS")==0){ switch(atoi(cmd2)){ // 指定されたセンサの値を送る case 0: Serial.print("AN0:"); Serial.println(analogRead(0)); break; case 1: Serial.print("AN1:"); Serial.println(analogRead(1)); break; case 2: Serial.print("AN2:"); Serial.println(analogRead(2)); break; case 3: Serial.print("AN3:"); Serial.println(analogRead(3)); break; case 4: Serial.print("AN4:"); Serial.println(analogRead(4)); break; case 5: Serial.print("AN5:"); Serial.println(analogRead(5)); break; default: Serial.print("AN0:"); Serial.println(analogRead(0)); // 全センサ測定 Serial.print("AN1:"); Serial.println(analogRead(1)); Serial.print("AN2:"); Serial.println(analogRead(2)); Serial.print("AN3:"); Serial.println(analogRead(3)); Serial.print("AN4:"); Serial.println(analogRead(4)); Serial.print("AN5:"); Serial.println(analogRead(5)); break; } } } } //-------------------------------------------------------------------------- // 航行ルーチン //-------------------------------------------------------------------------- void run() { while (digitalRead(START)==HIGH){ // STARTスイッチが押されたら抜ける if (digitalRead(RC_MON)==LOW){ // RC入力の有無で制御方法を分岐 run_gps(); // GPSによる航行 } else { run_rc(); // R/C操縦 } BT_com(); // Bluetoothによる外部機器との通信.例えばAndroidによるデータの送信など. } while (digitalRead(START)==LOW); // STARTを離すまで待つ } //-------------------------------------------------------------------------- // LED表示 // LED2(digital13:PB5),LED1(digital12:PB4),LED0(digital11:PB3) // を2進数表示させるために直接制御 //-------------------------------------------------------------------------- void dispLED(byte n) { PORTB &= B11000111; // LEDを一旦消す PORTB |= (n << 3); // LED表示 } // LEDを指定した表示で5回点滅させる void blink(int n){ int i; for (i=0;i < 5;i++){ dispLED(n); delay(100); dispLED(0); delay(100); } } //-------------------------------------------------------------------------- // セットアップ以外の初期値設定 //-------------------------------------------------------------------------- void initPara(){ pinMode(MOT_OUT, INPUT); // R/C端子を絶縁状態 np=0; // ウェイポイントの座標をリセット } //-------------------------------------------------------------------------- // セットアップ //-------------------------------------------------------------------------- void setup() { pinMode(SET, INPUT); // セットスイッチ pinMode(START, INPUT); // スタートスイッチ pinMode(LED1, OUTPUT); // 状態モニタ用LED pinMode(LED2, OUTPUT); // 状態モニタ用LED pinMode(rxPin, INPUT); // ソフトウェアシリアルRX端子 pinMode(txPin, OUTPUT); // ソフトウェアシリアルTX端子 pinMode(RUD_RCV, INPUT); // 受信機ラダー信号監視用 pinMode(MOT_RCV, INPUT); // 受信機モータ信号監視用 pinMode(RC_MON , INPUT); // 送信機ON-OFFのモニタ用 pinMode(MOT_OUT, INPUT); // モーター出力は絶縁か短絡.INPUT設定で初期は絶縁状態に rudder.attach(RUD_SRV); // ラダーサーボ制御用ピン設定 // シリアル通信の初期化 mySerial.begin(9600); // ソフトウェアシリアルの速度を設定(遅く) Serial.begin(115200); // ハードウェアシリアルの速度を設定(できるだけ早く) } //-------------------------------------------------------------------------- // メインループ //-------------------------------------------------------------------------- void loop() { initPara(); blink(7); while (digitalRead(START)==HIGH){ // スタートスイッチが押されたら指定プログラムを実行 if (digitalRead(SET)==LOW) { // セットスイッチが押されたらプログラムモードを進める delay(10); // チャタリング防止 while(digitalRead(SET)==LOW); delay(10); // チャタリング防止 pmode++; if (pmode > 7) pmode=0; } dispLED(pmode); // プログラムモードをLEDに2進表示 // BT_com(); // ここで頻繁に出力をかけると暴走するので注意 // Bluetoothによる外部機器との通信.例えばAndroidによるデータの送信など. } dispLED(0); delay(500); // 0.5秒待つ switch(pmode){ // プログラム実行 case 0: run(); break; // 航行ルーチン呼び出す case 1: break; // case 2: break; // case 3: break; // case 4: break; // case 5: break; // case 6: break; // case 7: break; // } } ジャンル別一覧
人気のクチコミテーマ
|