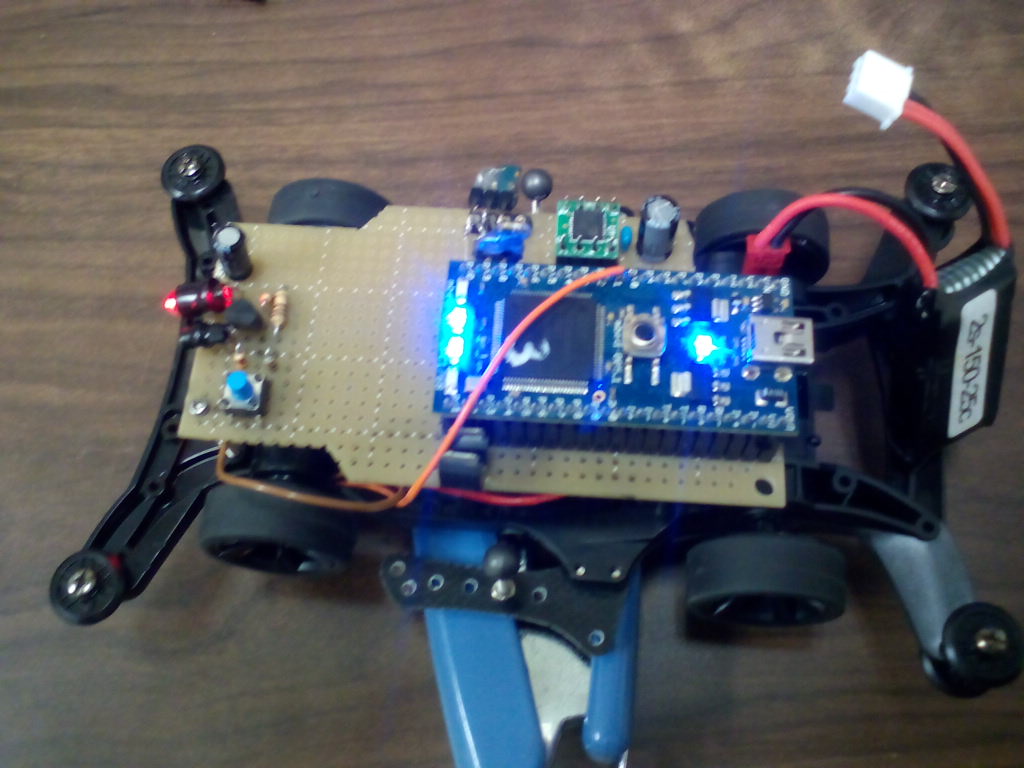
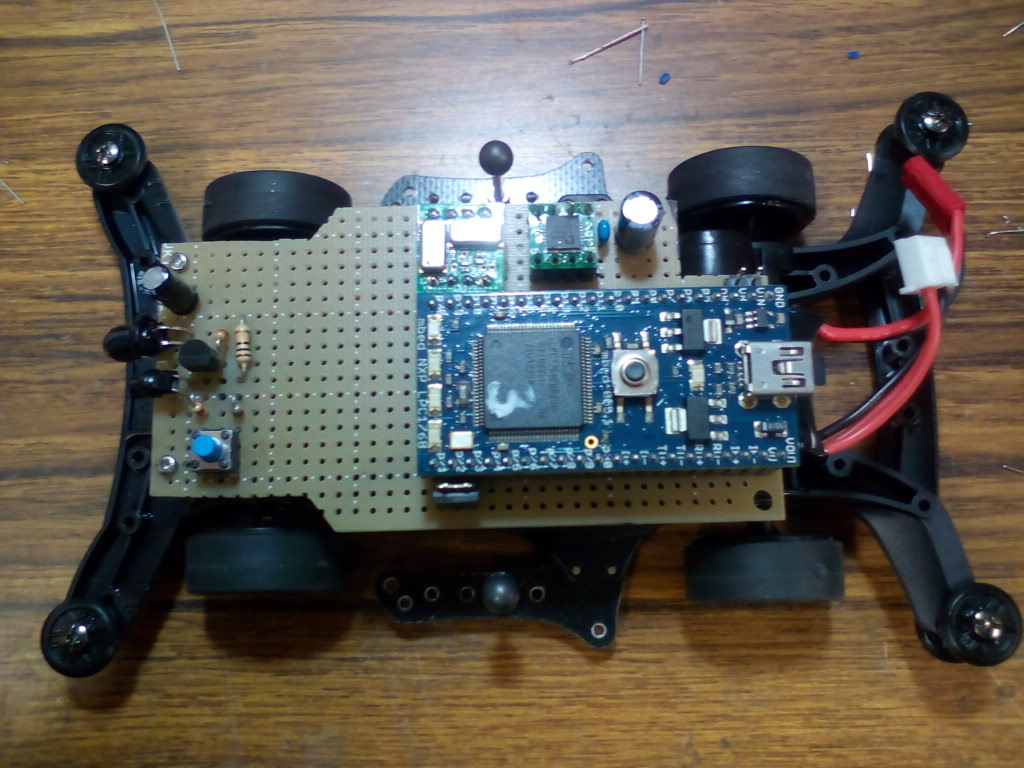
ミニ四駆AIのプログラム、ジャイロでスロープと切り返しを減速、スロー動画
更にプログラムを改良、コーナの切り返しが振られてコースアウトする可能性があるので、減速するようにしてみました。レーンチェンジの手前や切り返しのところで減速(青LED消灯)しています。後は、コースのログを解析して無駄な減速を省けばそれなりに速くてコースアウトしないようになるんじゃないでしょうか。(自分にはそっちのプログラムの方が難しいですけど)ミニ四駆AIのプログラム、ジャイロでスロープと切り返しを減速、スロー動画ちょっと詳しく説明。まず、走りながら、ジャイロの値を積算して角度を検出。ジャイロの仕様より振れが大きくて出力が飽和してまともに角度が取れませんが、簡易的なスムージングで変化分を抽出。ピッチの変化分からしきい値以上のアップで減速。ヨーの変化分の絶対値がしきい値以上なら減速。という考え方は単純な処理。まず、ジャイロの信号の扱いをどうするかの考え方と、丁度いいところで減速がかかるようなパラメータを探すのは苦労しましたが。この後は、減速を単純なしきい値でON-OFF処理じゃなくて、適当に連続的な減速をかけることと、コースの周回ログを取って、1周の周期を抜き出し、コースの形状を予測して、必要な所でのみ減速をかける処理。このプログラムは面倒なので、部品調達してハードを作りなおした後やります、多分数カ月後。というわけで、ミニ四駆AI化の第一部は終了。ミニ四駆AI、タイム計測ポイント2倍! 最短翌日発送!ミニ四駆特別企画商品 ミニ四駆スターターパック ARスピードタイプ (エアロアバンテ) 95210/送料無料★5,400円以上お買い上げの場合送料無料!!★18時までのご注文で当日出荷いたします(日曜は16時)NXP MBED NXP LPC1768搭載マイコンモジュール 【OM11043-598】