間が空きましたが,Arduino互換のRobotracer(ライントレースロボット)が完成しました.
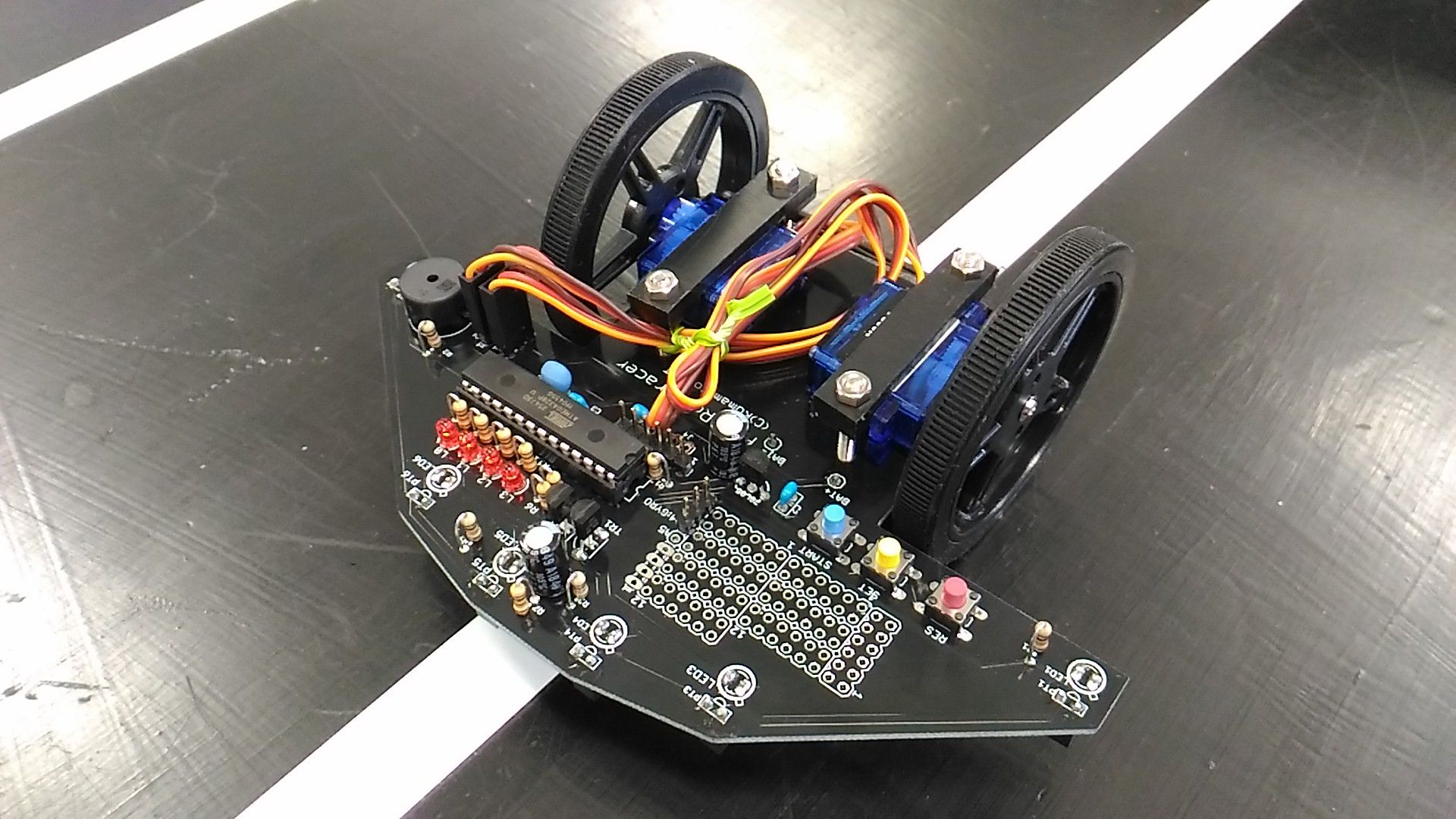
足回りは,秋月電子通商から購入した連続回転サーボとそれに合った直径60mmのタイヤホイールです.基板にはATMega328PとLED,センサ類,サーボ出力端子,入力スイッチが乗ってます.PCとの通信はUSBシリアル変換ケーブルを使います.プログラムの読み書きや走行ログを取る時に接続し,それ以外では外しておきます.
本体の部品代はおよそ300円くらい.教材用に25セット分揃えました.
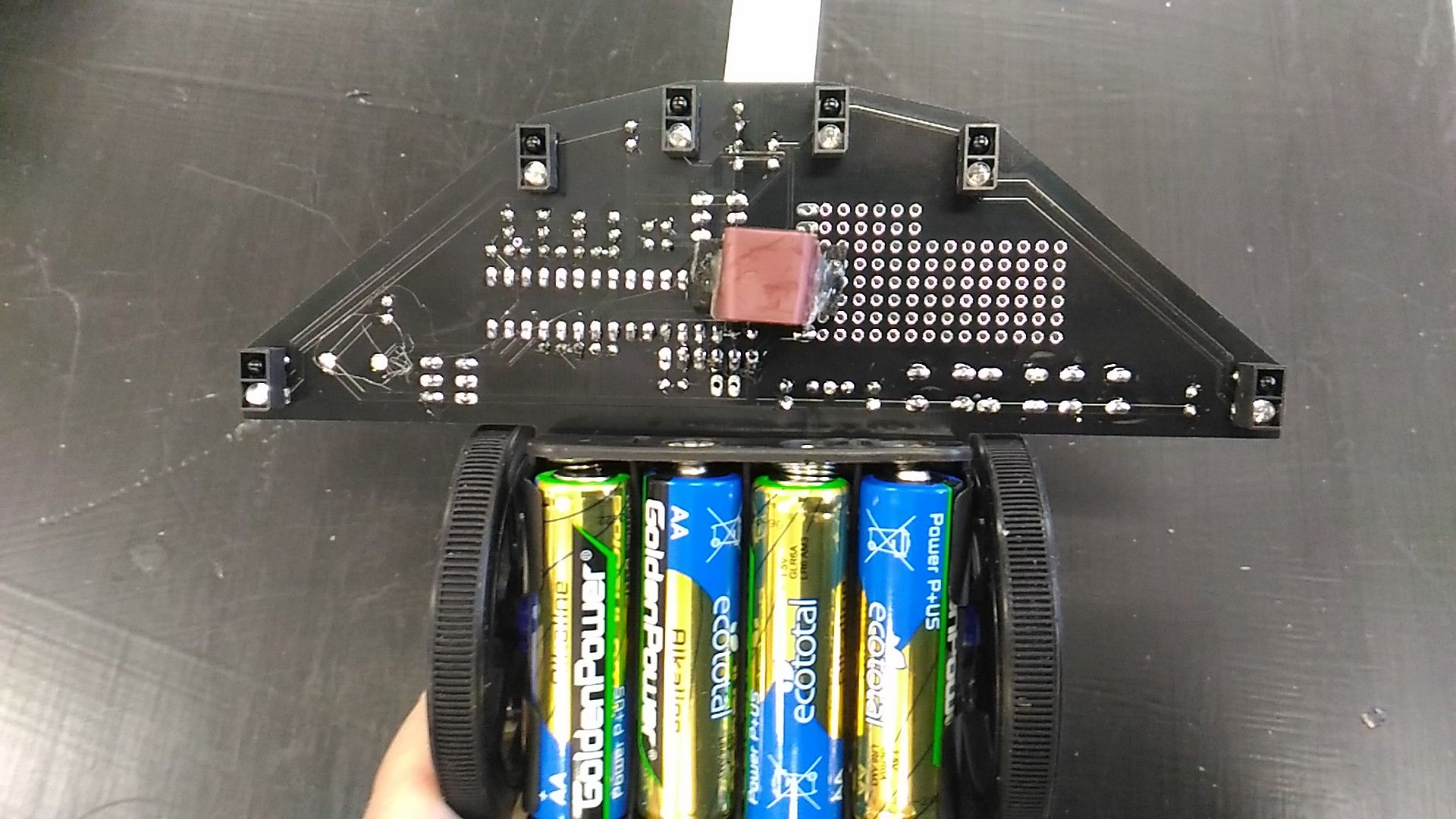
裏面のセンサの配置です.
ラインとの位置は4個のセンサで取得します.デジタル処理した後に位置をー3から+3の値に直して,モーターの速度制御に使いました.
左右のマーカー読み取り用のセンサも備えています.
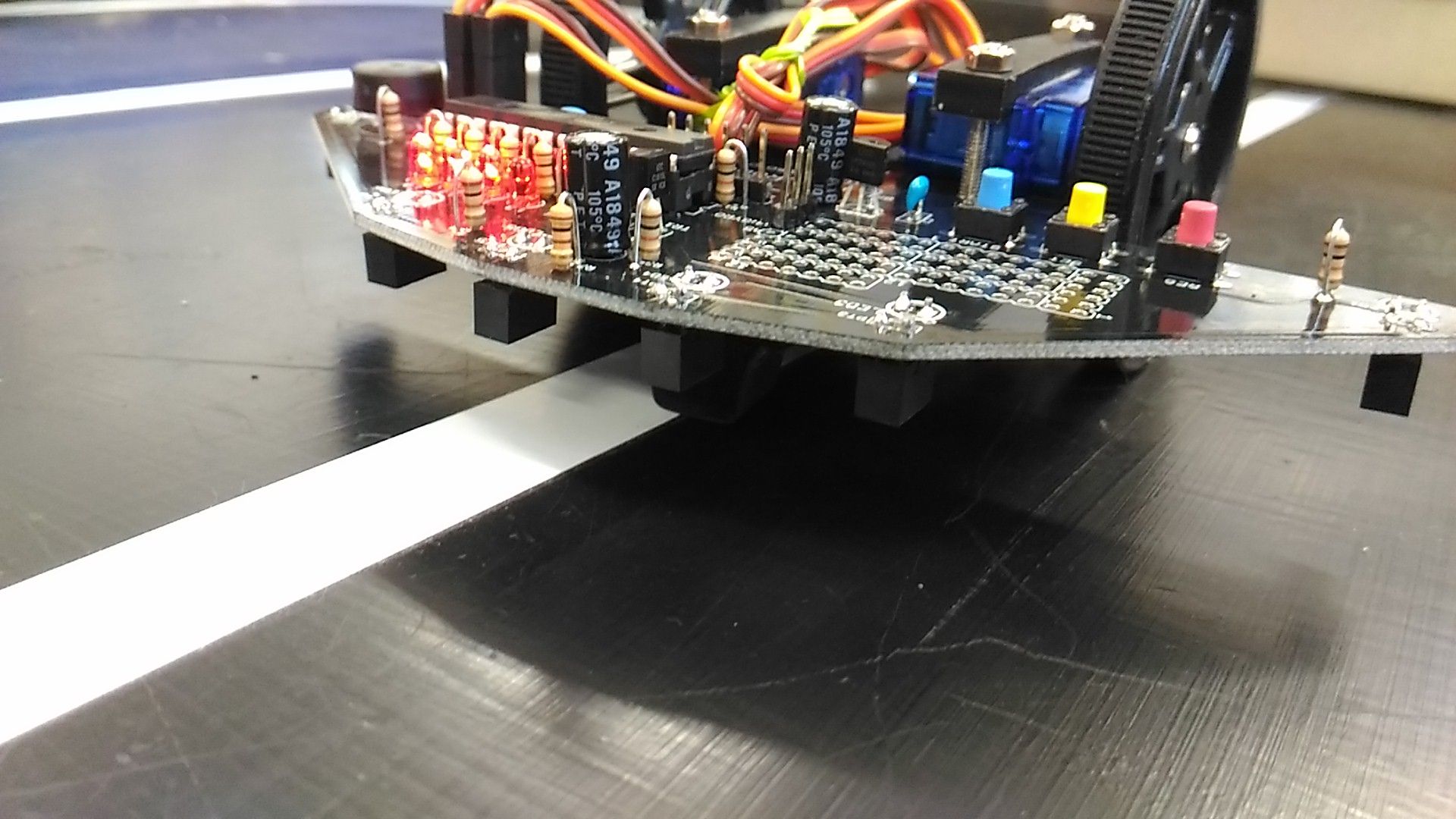
路面との距離はちょっと広め.車輪が大きいので素直に作るとこうなりました.
ラインをトレースし,コーナーマーカーを認識し,交差点と区別してスタート,ゴールマーカーを認識してゴールを超えて停止するサンプルプログラムを作成して,講座に利用しました.
その後,コーナーマーカーを使った走行履歴の記録と,履歴を使って直線のみ加速して走るプログラムも作成しました.
ライントレースの動画
走行ログを使った2回目加速走行.