|
|
|
|
2010.11.20
カテゴリ:二足歩行ロボット
合格して、1週間も終わりだんだんと落ち着いてきました。
入学手続き及び課題や合宿がある訳ですが、 合格しているので、精神的にもかなり楽です。 ロボット製作の方も再開しました。 サーボKRS-788を使って約3年。 ずっと、ガタに悩まされていたので、 KRS-2552用の直行軸の設計をしました。 今回は、下半身オール自作フレームになる予定です。 スプライン曲線や、カッコ良さも意識しました。 とにかく”ガタ”のない下半身を目指すために、 サーボホーン、フリーホーンもオールメタル仕様で 作ります。 これで、かなり歩行や攻撃時の下半身の安定感が増すと 思います! 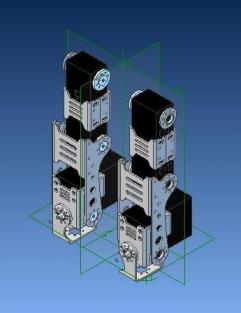 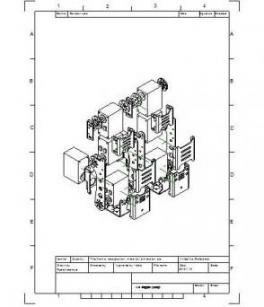 お気に入りの記事を「いいね!」で応援しよう
Last updated
2010.11.20 11:03:36
コメント(0) | コメントを書く
[二足歩行ロボット] カテゴリの最新記事
|
|







