|
|
|
|
2018.02.12
テーマ:マルチコプター同好会(74)
カテゴリ:マルチコプター
はい、まっくです。
電源ラインを修理しようと、自らはんだごてを持ちフンフンって調子にのり、基板を焼いてしまったオッサンは、涙で枕を濡らし再起ということでニューマシン購入に踏み切りました。 年末に発表のあったKingKong⇒LDARCにブランド名変更、そしてニューマシン発表があり、意外と早く日本にも入ってきました。 ※KingKongってブランド名っていうかレーベル名のようです。 既にTiNY6X Advanced Combo (プレミアムキット)は日本のショップさんでは結構完売をしてしまっていたのは知っていました。なのでTiNY6X Basic Comboの本体、バッテリ×1、充電器×1の簡単な奴をFUNFUN大阪店より早速オーダー。 実際、この様子をFacebookでもカキコしており、FUNFUN大阪さまの中のヒトは、ワイの事を認識していただけたようですwww。 2018年2月上旬現在でのBetaflightのバージョンはv3.2.4で、これはTinyWhoopsマシンでも調子が良いと海外サイトでも書かれていました為、わたしも前回のマシンでファームフラッシュしました。FUNFUN大阪さま出荷のものはv3.2.4との事なので良かったであります。 そして、その日のお昼?関西エリアの方からFBメッセージをいただき、TiNY6Xを余らせているとのご連絡w。まさに神の啓示?ではありませんが、せっかくご連絡いただきましたのもご縁と考え、こちらのマシンも引き取りしたいと思い、やり取りさせていただきました。 電源壊して、いきなりマシン2台に増強www まっくさん、やりすぎっす。 でもいいんです! いいんです! TiNY6で殆ど稼働しなかった19000KVモーターでの組み合わせでもう1台組み上げたかったのもあります為、そこでちょっと利用したいと思います。 また、公式では0615モーターじゃないといけないルールもあります。 TiNY6Xは0716モーターである為、グレードは上がってしまいます。飛ばしの練習は標準TiNY6Xで操作感を養い、レースマシンは別で仕上げる?なんて夢のようなプランですwww まあ、どっちにしてもワイは目視飛行はまだしも、FPVは全然できません。 まずはそこからですけどね。 その週はお仕事がすごく詰まっていたのもあり、週末にやっとBetaflightの確認、コンフィグの確認が出来ました。PID値はFUNFUNオリジナル設定が入っている為、ちょっとここでは記載は致しませんのでご了承下さい。(もし確認したい場合、FUNFUN大阪さまに一度ご連絡を頂ければ幸いです。) 設定の味付けとしては、LDARC標準設定と、banchoFPVさまが公開された、TinyWhoopsコミュ系の攻めのPID値との間ぐらいの設定になっています。以前のTiNY6初期型よりは数値的には上がっている印象です。 機体に慣れるまで、もう少しこの味付けで飛ばしてみて、banchoFPVさま公開の設定に変えようかと思います。RC Rate/SuperRateのところはストレートに直しちゃう方向で検討します。 ニューマシンを手に入れて、まず最初に進めなければならないのがプロポであるFutaba T10Jの設定です。ワイが記載したブログですが、皆さん一番人気はT10Jの設定のところを見ているんですね。 今回改めて設定を見直すにあたり、banchoFPVさまのブログで記載のあった【BladeInductrixでは、エレベータ、エルロンを利かせている際には約30%程度のスロットルMIXが入っている】という情報がありました。あれ?スロットルMIXは設定できたんじゃないかしら?と思って確認をしたところ、【タイプ:マルチローター】ではこの項目がない事がわかりました。 じゃあ【タイプ:ヘリコプター(H-1)】にすれば解決なのですが、CH6のARM設定をSwGへ割り当てするところなのですが、ヘリコプター(H-1)では、SwGは別信号に割り当てがされています。SwFとかにARM/DisARMを割り当てれば良いのですが、ちょっと標準的な設定を崩したくないなあ...という気持ちもある為、スロットルMIXはちょっと様子見したいと思います。 なので、一応設定は【タイプ:マルチローター】のままでいきます。 基本的には、以前設定を行ったKingKong TiNY6と同様なのですが、サブトリムとエンドポイントだけ、直していきます。 まず最初はサブトリムを調整し、センター出しをします。 ワイのやり方は中央値はFutaba標準の【1520】に合わせていきます。 ※他メーカのプロポと共存させたりする方は、1500をセンターとした方が良いかと思います。 〇 まず最初にFutaba T10Jとバインド。T10Jの方は事前にTiNY6Xで定義したいパラメータに合わせておき、電源ON。次に受信機にあるスイッチを竹串で押しながらバッテリーの接続をし受信機であるRX800-Proとのバインドをします。一瞬赤点滅⇒緑点滅(チカチカ)、その後緑点灯になればOKです。 ※これ、意外と難しいっすよ!w 〇 次にBetaflightへ接続。左ペインのメニュー【Receiver】を選択して、プロポのレバーを動かしてみます。ちゃんと反応があればOKです。 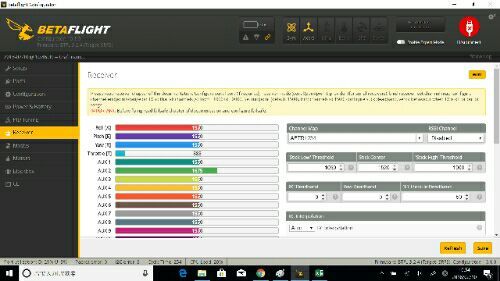 〇 最初にやるプロポ設定はサブトリム。プロポのレバーを両方ぐるぐるして動かし、レバー中央になったところで、ここが1520となるように、プロポ側のサブトリムを調整していきます。 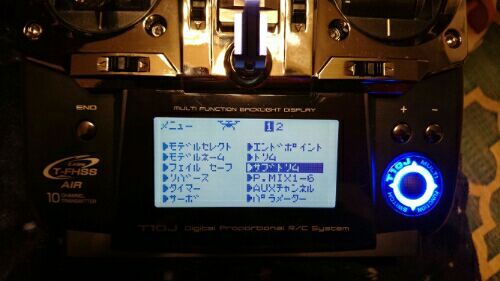  〇 次にエンドポイントです。数値は最小値1000、最大値2000としますが、状況によってはぴったりの数値にはならないのではないかと思います。ですので、そこは、数値がオーバーしない一番の近似値となるよう、エンドポイントの数値を可変させていきます。 ワイの環境の場合、最小値は998~1000、最大値は2000~2001で収まりました。 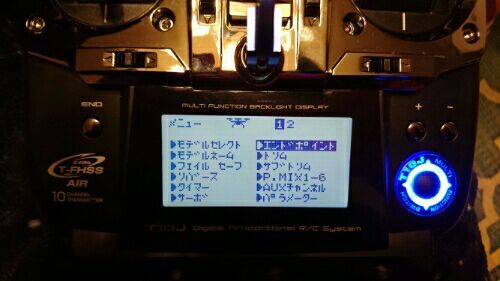  〇 何度かレバーをぐるぐるしては、この値を見直し、電源落として見直し...という事を繰り返し、問題がないか確認します。(設定したらBetaflightはこまめにセーブしましょうね。) 〇 次は、水平キャリブレーション。ワイは、おうちの床上に木の棒で底上げをしてUSBのケーブルとコネクタがぶつからないように逃げを作ってあげます。皆さん、色々冶具を作って水平キャリブレーションしているとは思いますが、便利なキャリブレーション用作業台とか作ったら売れるんじゃないかしら?(当然スマホの水平器使って、平かどうかを確認) USBケーブルが接続したままの状態で、手でもって八の字にくるくると軽く動かしてみます。そして作業台の上へそっと置き、上から人差し指できゅって押してあげて、足がちゃんと均等に作業台に乗っているか?確認します。 左ペインのメニュー:Setup>>Callibrate Accelerometerを押して水平を認識させます。この作業はすごく大事なので、必ずやりましょうね。 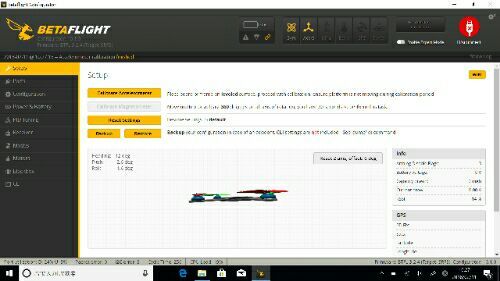 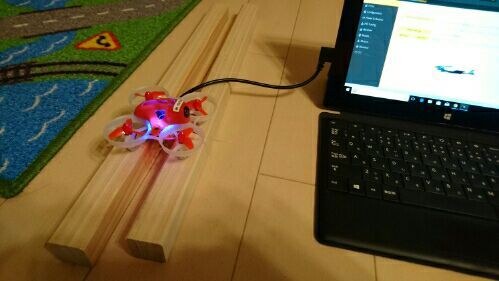 〇 最後にプロペラ等がモーターに均等に入っているか?確認します。モーター軸に真っすぐ挿入されているか?モーターボディと羽根とが4枚とも均等に入っているか?(ボディと羽根とのスペース)確認します。羽根がこすれていないかも確認します。 〇 Betaflightの左ペインのメニュー:一番下のCLIを選び、【dump】を入力しOKとし、現在のコンフィグを表示させ、それを画面でコピペ、メモ帳に残しておきます。 ~~~~~ これで設定完了です。 お気に入りの記事を「いいね!」で応援しよう
最終更新日
2018.02.18 22:40:53
コメント(0) | コメントを書く
[マルチコプター] カテゴリの最新記事
|






