|
|
|
IJEロボコン2008ダイレクトモーターとプロペラ.QRPからダイレクトモータとプロペラを買いました. 組み立ててみた写真がこれ↓  ラジコン電動飛行機やってる人ならあれっ?と思うでしょうが,これをロボットに使います. 3-5秒しか回さないから,多分大丈夫. --追記-- 2m位はなれたところからろうそく吹き消せました. 予想以上にいい感じです. 逆転用に15度の進角の付いた400クラス逆転専用モータです. 通常はギヤダウンユニットに使います. プロペラはダイレクト接続用を逆抜きに取り付けています. プロペラも単に逆転すれば逆に風がでるのですが, 逆向きに付けたほうが効率はupするはずです. 逆向きではスピンナーに入らなかったのでニッパーで切り込みました. 飛行機が飛んでいる状態で適正な負荷がかかるように作られているので, 固定した状態でプロペラを回すと過負荷になりますので注意が必要です. ------------------------------ 今度出場するロボコンの設計図 非生産的な仕事ばっかりでリフレッシュに頭の中にあった構想を書き出して見ました. 雑用が一通り片付いたら,これを作り始めます,というか大会まであと1ヶ月ないです. 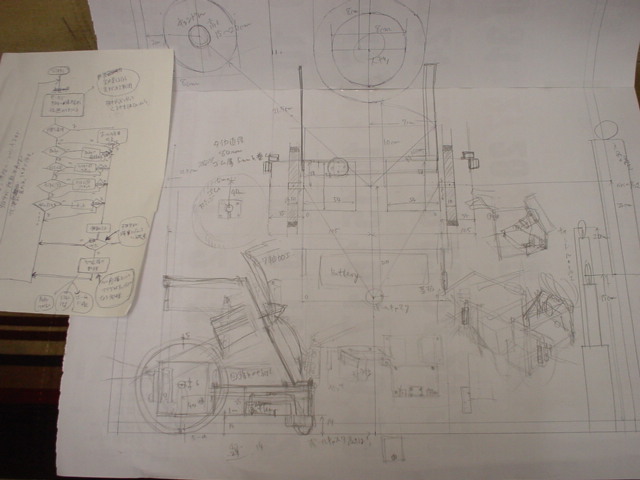 --追記-- 日本から2チーム招待らしく,もう1チームは東〇大から. 今日参加者リストが届き,あちらは学生さんのみで行くらしいです. こちらは学校の性格上,引率教員が必要なので,私と学生2名で行きます. ------------------------------ コンテストロボット製作中 こんな感じで部品を一部作りました. あと,タイヤを作ります. 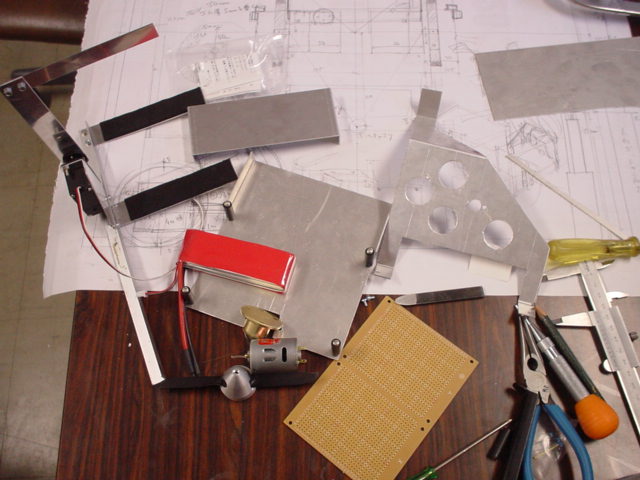 こんな感じで組みあがります. 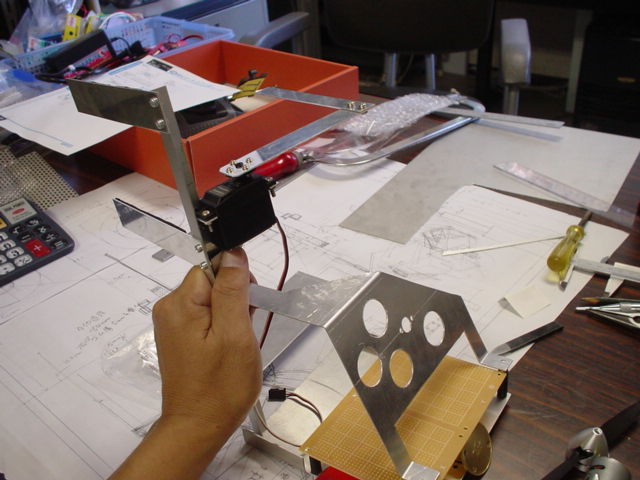 後はモーターが着たら,現物に合わせて穴あけして組み立て. 電子回路を作って,プログラムを作って,調整. ------------------------------ 測距センサ 買ったけど,詳細がわからないので問い合わせ. でも3日たっても音沙汰無いので自分で実験中. 対応が悪いのか,部品なので,対応が良くないというべきか. ------------------------------ コンテストロボット製作その2 タイヤを除いたフレーム部分ができました. 形が見えてきたのでひと安心です. あとは,タイヤと電子回路とプログラム. 対戦相手が見てるかもしれませんので,何というロボコンかは伏せておきます. といっても,このロボコンは,ハードの性能よりソフトのウエイトが大きいようなので, ハードは簡単に作ってソフトを作りこむほうが勝ちにつながりそうです. 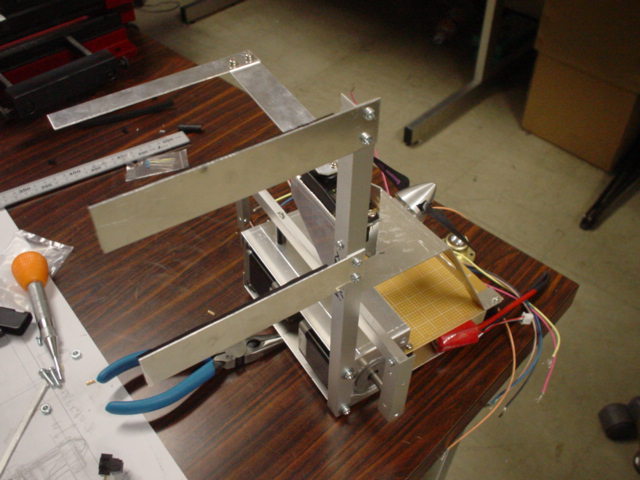  ステッピングモータ SST39D1040  ステッピングモータ・ドライブボード Y98STM ------------------------------ コンテストロボット製作その3 今日はホイールができました. タイヤには1cmくらいのゴムシートを貼る予定です. フレームはほぼ組みあがりました.あとは電子回路とプログラム. と,ここで問題発生.勘違いでステッピングモータ駆動用ICの在庫を切らしてて至急注文. 来週の月曜日には届くそうで,安心しました. 来週中にハードが完成すれば,3週間くらいソフト調整の時間が取れます. 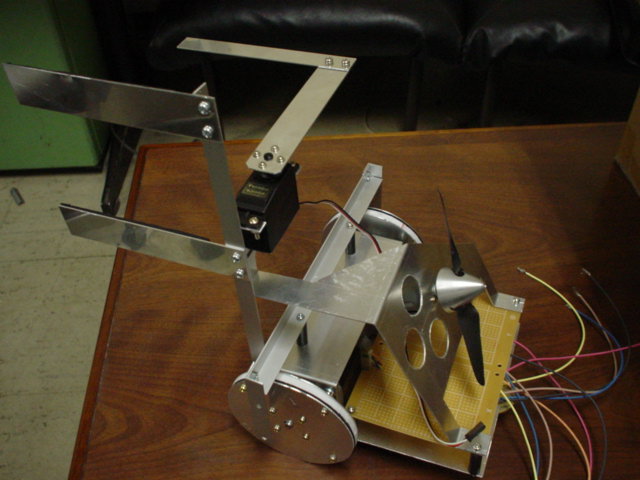 学生のロボコンの目処がついたので, そろそろマイクロマウスの中部地区大会出場の準備にかかります. あいかわらず学校の雑用は山積みですが.  楽しい競技ロボットの作り方 ------------------------------ コンテストロボット製作中その4 モータ駆動回路の実験中. 400クラスのモータをフルパワーで回すと,電圧が8V->6V位まで落ちます. ちょっと回しただけでFETスイッチがかなり発熱します.放熱板が必要です. ボリュームでゲート電圧を調整してみるとパワーを落とすことができ,8V->7V位で回せました. モータ回す前↓ 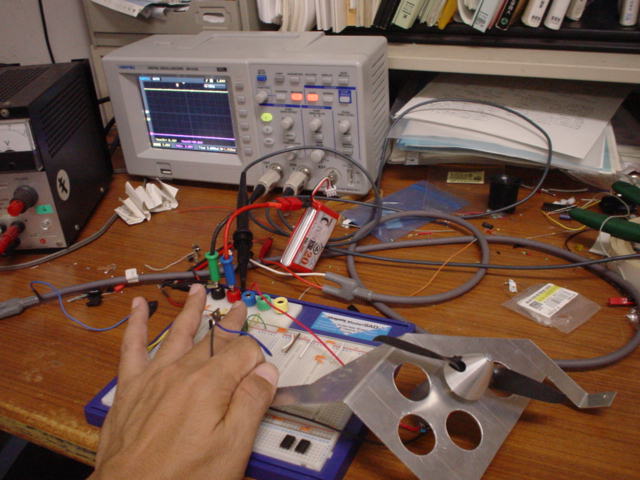 回したところ.電圧が1Vほど下がっています↓ 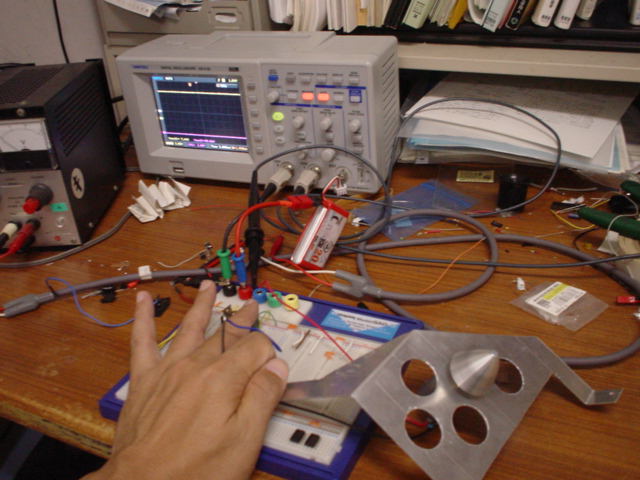 ------------------------------ コンテストロボット製作中その5 タイヤを貼って,測距センサを取り付けました. モーター駆動用のMOSFETはモータを固定しているアルミパネルに取り付け,強制空冷です. モータが危険なのでスイッチも扱いやすい位置につけました. 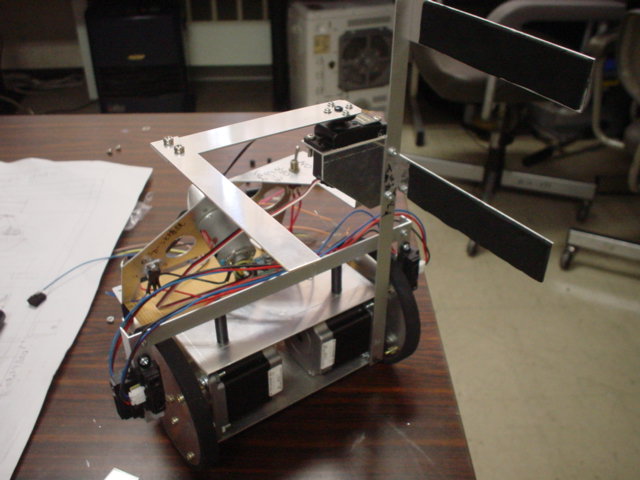 ------------------------------ コンテストロボット製作中その6 基板がおおよそ出来上がりました. あとは回路をチェックして組込んだらハード完成です. 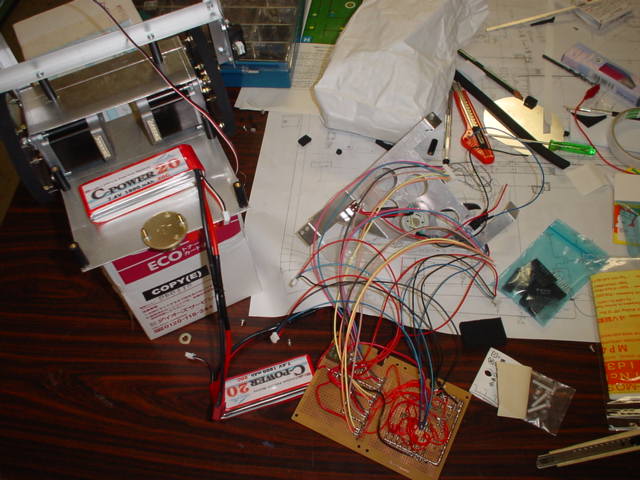 今週頑張ってもらえば来月の本番には間に合いそうです. ------------------------------ コンテストロボット製作中その7 動き始めました. ホイールもサーボもファンも回って,プログラムも基本部分だけはなんとか動き始めました. あと4日です. 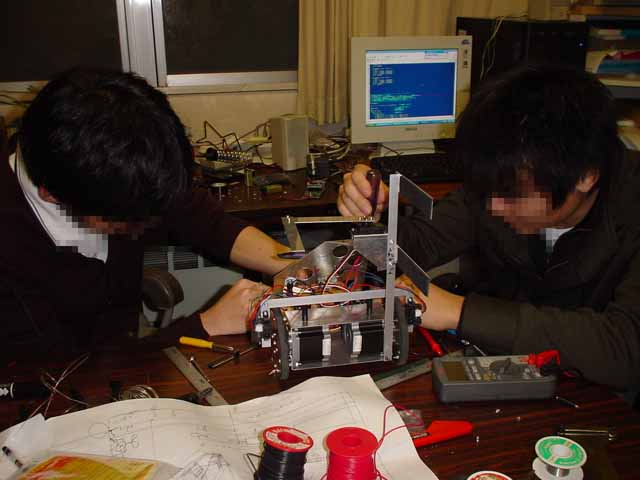 ------------------------------ コンテストロボット製作中その8 昨日は夜までかかって,調整,今日センサを一部作り直し予定. 明日の出発までに間に合うか!? 学生さんたちもやっとエンジン全開です.  ------------------------------ 完全勝利!! なるか? 本校の学生さんは,やっぱりすごかったです. 土壇場でロボットを作り上げました. 確率は高くないですが,完全勝利パターンをこなすロボットができました. 相手が進路に入って妨害してきても,他のポイントを取りに行く回避行動も取れます. 相手がいる何のロボコンかは書いていませんでしたが,これはIJEロボコン2008という大会で インドネシアと日本の国交を記念したエキスポに開催されるものに招待で行きます. ここまでできたら,作戦も何も無い,相手の出方で自由に変化できますので,あとは,ロボットのスピード勝負です. これより早いロボットが出てきたら,逆にこちらで進路をふさぎに行くかな・・・?  ------------------------------ IJE Robocon 2008 の結果 大会当日の写真↓  運よく3位入賞.準決勝では0点でしたが,自律ロボットとしては完璧な動きをしていましたので個人的には大満足です.  大会の結果はこちら 出発前に撮った動画はこちら. 予選リーグの動画はこちら. JICAのページに記事が載ってました http://www.id.emb-japan.go.jp/oda/jp/topics_200901_ijexpo.htm ソースプログラムはこちら↓ TheDenpaFinal.c [ソフトウェアの考え方について] ・区画ごとに走行することに関しては基本的にマイクロマウスと同じルーチンを使用. ・マップは固定されているので最初から与えておく. ・火を消したりベイビーを救出しにいくには,ロウソクやベイビーにフラグを設定し,フラグを見ながら優先順位をつけてそれぞれ場所にいかせる. ・場所への移動は,マウスの最短経路探索ルーチンを使って,スタート,ゴールを設定して経路探索する. ・経路途中に障害物(相手ロボット)がいたらそこを仮想壁とみなし,経路を再探索.(袋小路で相手に邪魔されたら動けなくなるがしょうがない) ・指定場所に着いたてフラグが経っていなかったら指定動作をさせる.例えばロウソクなら後ろを向いて45度回してロウソクの向きにファンを向けて,ファン回転,など. ・完全勝利パターンのフラグが全部立っていたら,スタート位置に戻ってベイビーを離す. ・その後は,残っているロウソクを消して回る. ジャンル別一覧
人気のクチコミテーマ
|



