|
|
|
|
2009/12/21
カテゴリ:2009年 B班
今回私共は、生物の動きをLEGOのロボットで再現することを目的として、多足歩行ロボットを作成いたしました。
モデルにしたのはボリビアバグと呼ばれる生物で、足が多く、歩行が安定していそうだったので選びました。  作製したものはこちらになります。 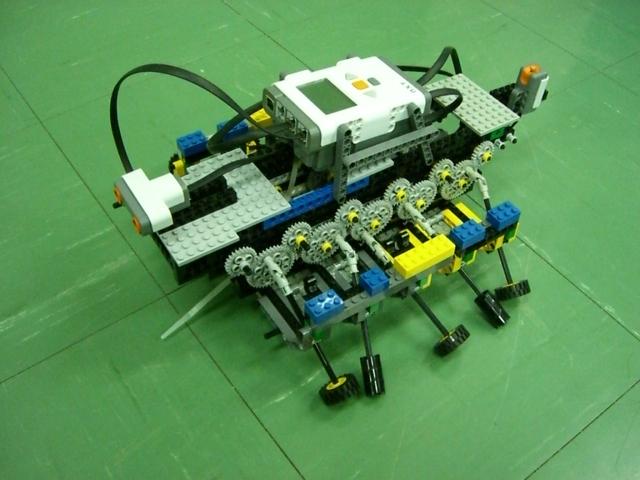 このロボットを作成するに当たり、まずは足機構の製作を始めました。 モデルとした生物の足は、一本の足だけを見れば、足の腹をつけるようにした回転運動でした。 この動きを再現するために採用した機構は、スリットを通して回転運動を足の先に伝えるというものです。 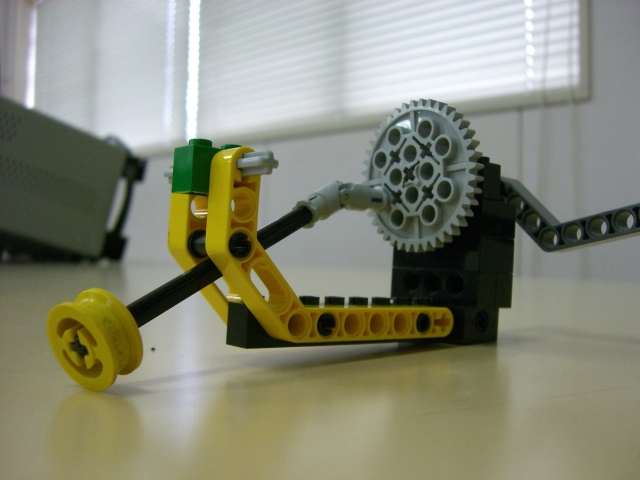 これらを横に並べ、ギアで回転運動を5本分動くように設置しました。 次に本体ですが、これはなるべく軽く小さくするために、モーターを縦に設置して無駄なスペースを無くしています。 また、このモーターには小さなギアを一つつけてあり、足が回る速度を極端に遅くし、足にかかる負担を軽減しています。 機構を考える上で最後に考えたのが、負担に対する対策でした。 足にかかる負担の多くは、自重を支えることから来るもので、これが予想外に大きいものでした。また、足同士の接触なども大きな負担となりました。 これにより、歩くだけでギアが空回りしたり、フレームが分解したりなど、LEGOであるが故の脆さが大きく出てしまいました。 これを補うために3つほど工夫を施しました。 ・フレームの横側に縦に一本入れ、無理やりフレームの分解を防ぐ。 ・全体に補強用のLEGOを追加して、フレーム強度を強くする。 ・接触する足からラバーを取り除き、自重を支える役目だけに特化させる。 これにより、全体が強固になっただけでなく、歩行も滑らかになりました。 以上がこのロボットの機構となります。 機構担当:森 ロボットのプログラムを考えた、宮崎です。 このロボットでは超音波センサーや光センサーによって周囲の状況に対応した行動ができます。 超音波センサーでは前方10cmに障害物があった時反応し後退することで衝突を回避します。光センサーでは暗くなるとロボットを停止させます。 bluetoothによる通信にも挑戦しました。リモコンにある右、左のボタンを押すと命令が送られ、本体のほうで送られてきた命令に対応したプログラムを実行することで、左右に曲がることができます。 以上、このロボットのプログラムについてでした。 担当:宮崎 お気に入りの記事を「いいね!」で応援しよう
Last updated
2009/12/21 11:40:20 AM
【毎日開催】
15記事にいいね!で1ポイント
|
|





