|
|
|
H8で超音波センサの実験MX001 LV-MaxSonarをメカロボショップさんから購入しました. 動作チェック. 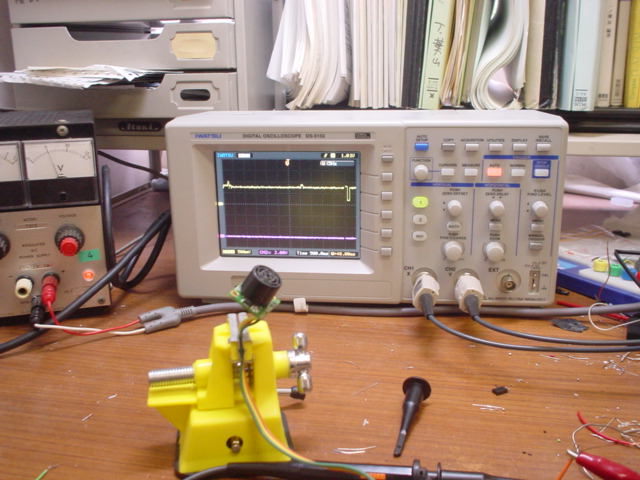 動画はyoutubeにアップ,超音波センサのテスト. 電源5VとGNDをつなぐだけで,アナログ出力で距離がわかります. ただし,静止画を見るとわかるように,アナログ出力は不安定,時々パルス状に レベルが変化したり,大きな距離変化を加えるとアナログ信号が乱れるようです. 2.54cm単位の出力なので長距離レンジでの用途には使えそうです. 英語マニュアルをよく読んだら,パルス幅出力もあることがわかりました. 早速テストしてみると,安定してていい感じです.分解能もちょっといいかも・・・? 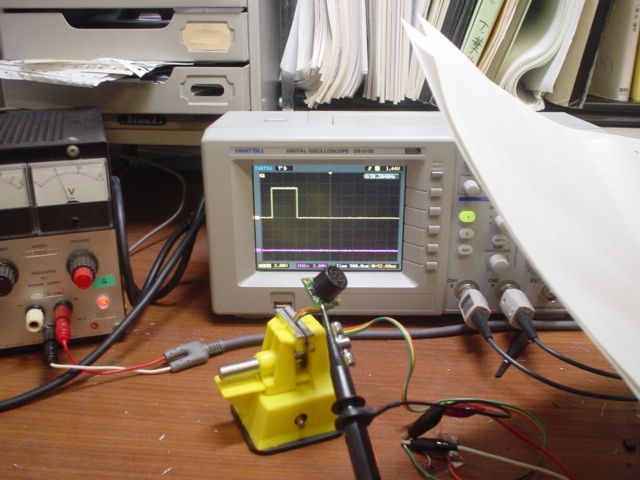 そこで,H8で読み取りプログラムを作りました. アナログよりパルス幅出力(PW)の方が安定してます. H8のデジタル入力からパルス幅をカウントしてLCDに表示させてみました. こんな感じ↓ 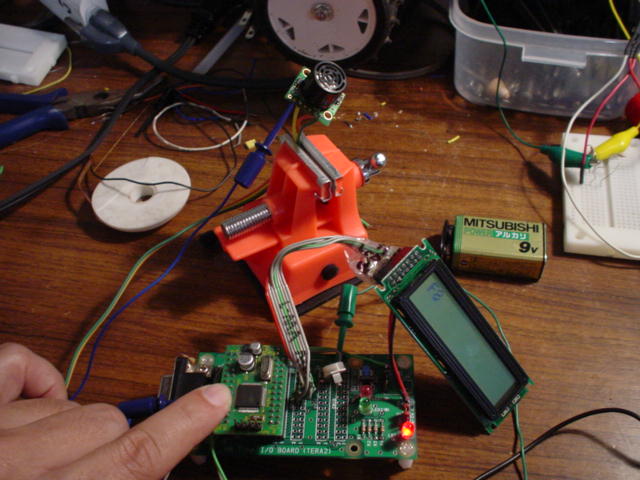 プログラムは,前に書いたラジコンの送信機の信号自動切換えのタイマVの割込みのなかに もう一つソフトウェアカウンタを2行追加し,LCD表示の関数を組み込んだけ. パルス幅が147μS/inchらしいので,100μsくらいでカウンタを回すと丁度いい感じです. if (IO.PDR8.BIT.B6==1) cntU++; // P86 にPW信号入力 else if (cntU!=0){ disO=cntU; cntU=0;} // cntUでカウンタ,disOに保持 ジャンル別一覧
人気のクチコミテーマ
|



