|
|
|
|
2019.10.13
テーマ:暮らしを楽しむ(383677)
カテゴリ:ドローン
初号機のベースは、Kingkong FPVEGG V2。これにiFlight SucceX mini F4 V3 に積み替えた。するとBlackBOX 32MBが装備されたので、これを利用するのが次の課題。
BlackBox ExploExplorer の結果を眺めてみたけれど良くわからない。見方を書いた日本語のページもうまく見つけられない。この他に、Plasmatree PID Analyzer というのがある。 Tuning your FPV drone with Plasmatree PID Analyzer これの出力結果がこんな感じ。 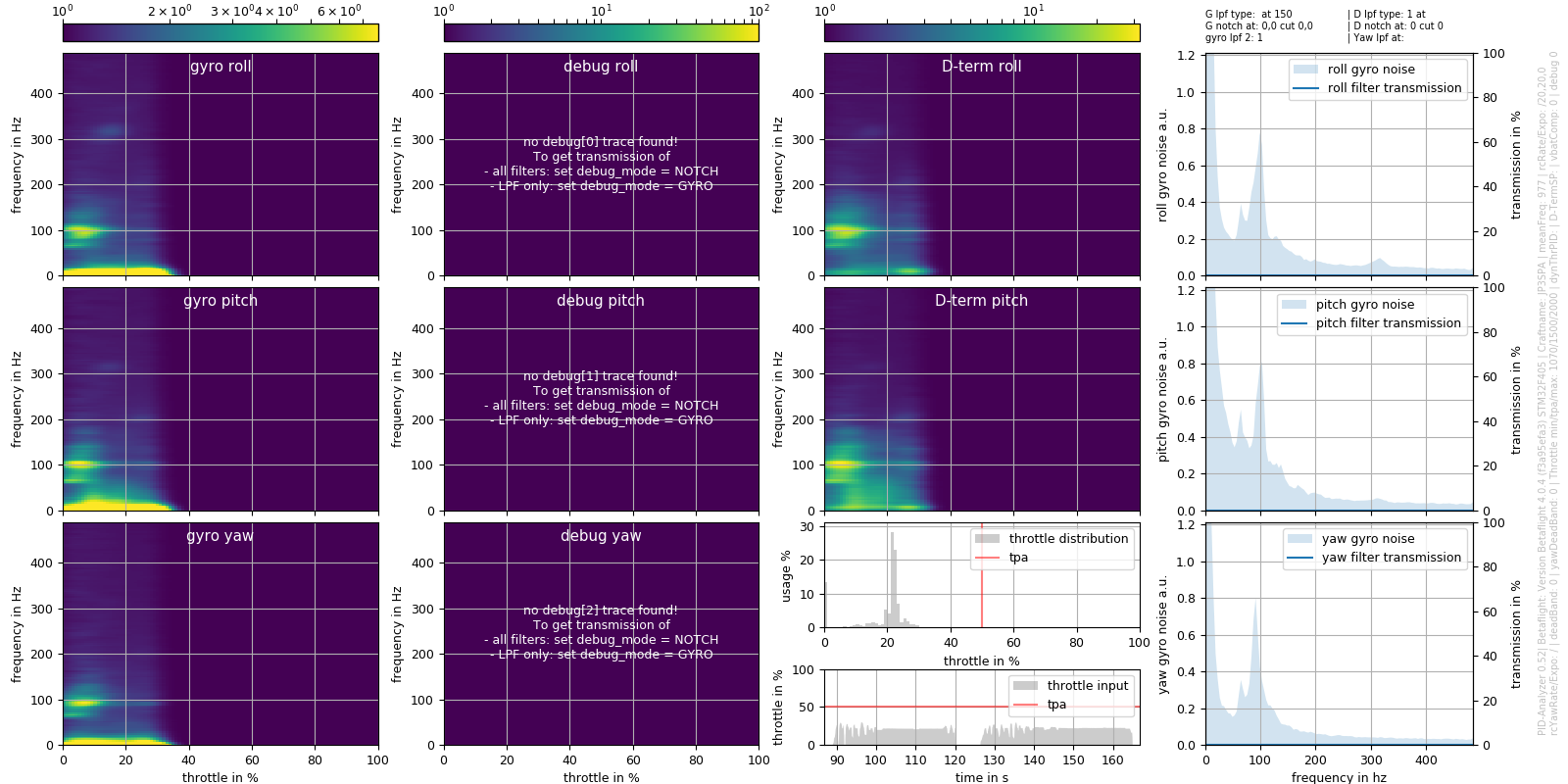 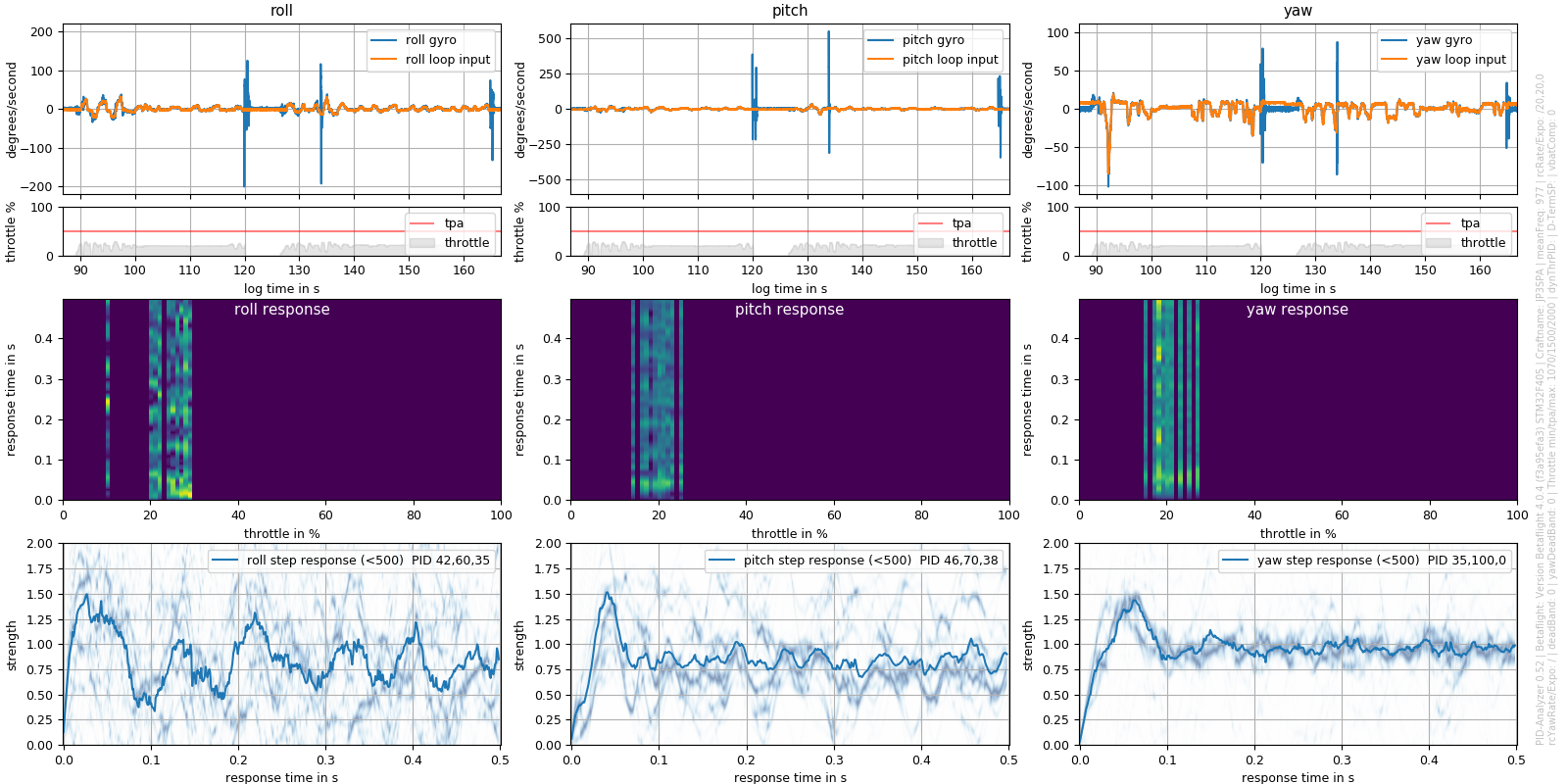 上の図でグラフが書かれていない。設定でdebug_mode=NOTCH と書かれているけれど、そのようなオプションはない。サイトを調べてみると、Gyro_scaledにしろと書かれているので、そのように設定してみた。 下の図のグラフは、なんかよろしくない。Rollは収束していないし、Pitch、Yawもオーバーしてから戻ってきている。まずは、Pを減らすことで様子を見るのかなぁ。 ということで、Pを減らしたパターンを2つ用意して、明日はFPVの動画と、BlackBOXの記録をとって調べることから。ブンブン飛ばしてデータを取ろう! どこかに、BlackBOXの使い方が書かれた日本語のページ無いかなぁ? お気に入りの記事を「いいね!」で応援しよう
最終更新日
2019.10.13 21:31:48
コメント(0) | コメントを書く
[ドローン] カテゴリの最新記事
|
|







