|
|
|
|
2011年02月09日
カテゴリ:ロボット
先週まで出張でした。
ロボットの製作ができなくて悲しいです。 今週は代休とってますが、来週からまた出張だったりw 金曜に開催されるわんだほーは見学に行きたいな。 天候しだいだけど。 なかなかロボットの製作の時間が取れないのですが 夏のわんだほー後にコツコツ作っていたのが 形になったので、今回のネタにしようと思います。 ●ファイナルギアで駆動! 以前、ほりさんのコメントで >サーボホーンにギアをつけるとどうしても幅が膨らむので >サーボのファイナルギアを使って、関節にもギアをつけて >関節ギアの軸受けをサーボ側に保持させると、細くならないかなぁと思いました。 というのがあって これはできそうだなぁと思って、ちょっと検討していました。 もしかしたら違うかも知れないけど、多分こういう方式かな? 今現在のミルフィは、こんな風になっています。 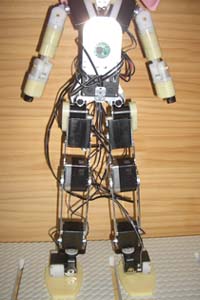 少しずつ良くなってきていると思うのですが まだまだ、検討の余地があります。 個人的に一番注目しているのが膝で ココを細くできると見栄えが良くなりそうです。 膝を細くするために 「ファイナルギアで駆動!」を踏まえて設計してみました。  作った部品は少なめです。 サーボはKRS2552HV。 KRS2552HVをKRS4000番系のファイナルギヤのモジュールが一緒だったので 膝関節にはKRS4000番系のファイナルギヤを使いました。  構造は単純で、 KRS2552HVのファイナルギヤからKRS4000番系のファイナルギヤに 伝達する方式です。 KRS4000番系のファイナルギヤに直接アームをつけて サーボホーンを省いています。 重量的にお得なのか?は分かりません。 細くなれば良いのです。 今回はケースの加工が必要でした。 削ったり、イリサート入れたりと。  こんな風になりました。 アームの形を変えれば、股間接にも使えそう。 これは、結構良いかもしれない。 お気に入りの記事を「いいね!」で応援しよう
[ロボット] カテゴリの最新記事
|
|





