9thROBO-ONE大会向けNOPS4
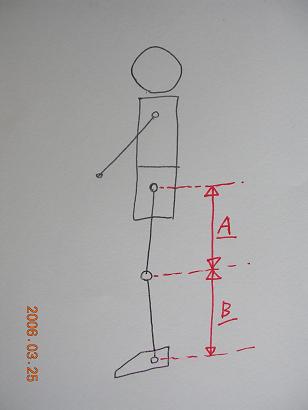
□■□9thROBO-ONE大会向けNOPS4の反省 ■□■太モモの長さAと、スネの長さBは、同じにした方がティーチングしやすい。同じにすると、腰角度Aと膝角度Bと踵角度C角度が計算上で求めやすい。例えば、膝角度B=腰角度A+踵角度C、かつ腰角度A=踵角度Cをキープして角度を加減すれば、簡単に垂直の屈伸動作が完成する。垂直に屈伸した場合、膝角度B=腰角度A+踵角度C腰角度A=踵角度Cならば、膝角度B=腰角度A×2=踵角度C×2となると、垂直に屈伸しようとすると、膝角度Bは腰角度A・踵角度Cの2倍の速度で動作しなければならない。同じ速度で変動させると、腰Aと踵Cが早く回転しすぎて後方に点灯してしまう