|
|
|
|
全て
| カテゴリ未分類
| SH4
| AX-12
| シミュレータ
| 夏休み
| あまね
| onPC/sat.
| FPGA
| ロボットビジョン
| SEMB1200A
| 新しい機体
| SH7125
| onPC4th
| 蹴飛ばしても倒れないロボット
| フィールドウォーカー
| 新・新しい機体
| SH7786
| Linux
| Arduino
2005年02月08日
カテゴリ:カテゴリ未分類
逆運動学2.1の「.1」の部分が、下の図です。(^-^)v
図を描いて式を立てるまで、小一時間・・・。 エクセルでの検算では、θ1’の計算部分で領域がちょっと引っかかったけど、 問題はそれだけで、あっさり検証も完了です♪ これで2軸直行にこだわる必要もなくなるのかな? ちなみに、この図はonPC2で頂いたインベンタ9に付属のAutoCADメカニカルで書いたのですが、 いつも使っているAutoCADとかなり勝手が違って・・・。(^^;;; 感覚的にはインベンタの色が濃いですねぇ。ごまかしが効かないというか。 そうそう、あと、通勤電車の中で、C#の入門書も一通りナナメ読みが完了。 思想というか、どんなものかはなんとなく理解・・・。(^^;;;ホントカ? あとは、実践あるのみですっ! でも、まずは、7046をKHR-1の背中に積むべく、拡張ボードを設計しないと。 メモ:KHR-1のマニュアルの中に赤ラベル(サーボ)について、 位置パルス取得後は100μs以内にマイコン側を出力に戻せと書いてあった・・・。 うむ~。やっぱり念のため御尻を拭いて回るか。 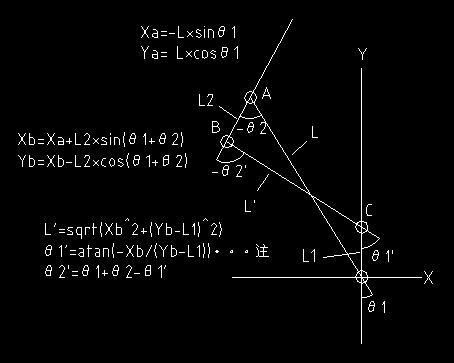 お気に入りの記事を「いいね!」で応援しよう
最終更新日
2005年02月09日 02時39分21秒
|
|
|




