みなさん、こんにちは。
最近、自動運転車に関する記事を書く機会が増えました。
それに際して、いろいろと資料を調べているのですが、調べれば調べるほど、「ホントに大丈夫なのか?」という疑問が大きくなってまいりました(^^;。今回は、そんなお話です。
まず、「自動運転の定義」から見てみましょう(http://www8.cao.go.jp/cstp/gaiyo/sip/keikaku/6_jidousoukou.pdfから引用)。
これはNHTSA(北米運輸省道路安全交通局)や日本が採用しているもので、SAE(Sosiety of Automothive Engeneers)は、「レベル4」をさらに二つに分けています。
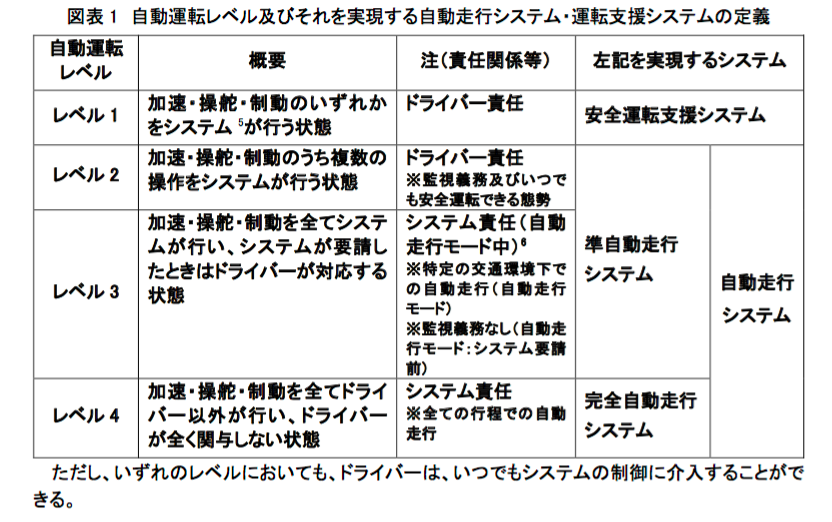
大雑把に言えば、先行車追従型クルーズコントロールと、車線中央維持支援ステアリングが付いていれば、「レベル2」の定義を満たすことができます。日産の「プロパイロット」はこのカテゴリーですし、スバルのアイサイト・バージョン3も、この定義を満たしていると言って良いでしょう。他社のシステムでも、満足しているものがあるのではないでしょうか。すなわち「自動運転」と言っても、「運転支援システム」の域を出ていないわけですね。
自動運転のメリットは、ドライバーの疲労軽減、人為ミスによる事故や渋滞の削減のほか、運転技術が未熟または衰えたドライバーのスキルを補うなどということもあります。
ここで注目していただきたいのは、「レベル3」までは、システムに限界が生じた際にはドライバーが運転する必要があることです。自動運転システムが稼働している最中に事故が起きればシステムの責任になりますが、システムが限界を検知してドライバーに交代を要請しているにもかかわらず、それを放置して事故が起きれば、ドライバーの責任が問われるということです。
一方で、レベル3に達すれば、システム稼動中はドライバーに運転注視義務はなくなります。問題はそれによって生まれた余裕を、何に使うのかということです。物流ドライバーならば、伝票の整理とか次の業務の準備とかができますから、大変結構なことだと思いますが、一般ドライバーの場合、特別やらなければならないことはありません。行き先のガイドブックを読むとか、ビデオを見るとかになるとおもいますが、すると覚醒度が低下してくる可能性があるんですね。簡単に言うと「寝ちゃうかもしれない」。
そうなったときにもし、システムからの交代要請があったら、スムーズに対応できるでしょうか?
例えば、ゲリラ雷雨で前方の様子をカメラが捉えきれなくなるとか、トンネルを抜けたら積雪で路面が真っ白で、カメラが車線を認識できないとか。ましてや初心者や高齢ドライバーが「自動運転装置が付いているから」と出かけていった場合、正しく対応できるのかというと、非常に心もとないと言わざるをえません。
すなわち、自動運転の目的のひとつが「ドライバーの負荷軽減」であるにもかかわらず、「いかに覚醒度を低下させないか」という相反要素を両立させなければならないのが、レベル3までの自動運転なんです。
具体例を挙げると、ベンツEクラスの”ドライブパイロット”に装備された自動レーンチェンジ機能です。2車線道路でドライバーがウインカー操作をすると、後方に向けたレーダーが後続車を検出し、車線変更できるタイミングで自動的に操舵してくれる機能ですが、ここに覚醒度の低下を防ぐ操作ロジックが組み込まれています。
現在の欧州車の多くには、ウインカーレバーをディテント(カチってなるところ)の手前まで操作すれば、3回点滅して消えるという機能が付いており、レーンチェンジの際にこれを使えば、終了時に戻す必要はありません。ところがドライブパイロットの自動レーンチェンジ機能は、ディテントを超えないと作動しないようになっており、自動レーンチェンジが終了したら、ウインカーを手動で消さないといけません。
どうせ自動化するなら、機能がONのときはディテントの手前までの操作でも、レーンチェンジを開始するまでウィンカーを出し続け、終了したら自動消灯してくれたほうが便利でしょう。技術的にできない話ではないので、なぜそうしないのか、と本国の技術者に質問したら、「覚醒度が低下しないように、ドライバーの操作を残している」ということでした。自動化したはずなのに、今までは必要なかった操作が増えたというところに矛盾が生じているわけですが、これを抱えたまま進んでいかなければならないのが、自動運転技術なんですね。
「でも、そこを乗り越えて完全自動運転のレベル4に達してしまえば」と期待するのは当然ですが、実はレベル3の延長線上に、レベル4が存在するわけではないんです。レベル4の完全自動運転は、ドライバーの操作をまったく必要とません。となれば、ハンドルやペダル類などの運転装置はもちろん、前を向いた運転席を用意する必要もありません。
一方、周辺状況の把握には、全方位にわたるレーザースキャナーが必要になりますし、ロバスト要素への対応(停電で信号機が消えてしまった場合に警察官の手信号を判別する必要があるなど)も必要になりますから、処理すべきデータが膨大になり、コンピューターの大きさも非常に大きくなり、それはトランクスペースを潰してしまう可能性があります。すなわち、現在のクルマと同じ格好をしているのは合理的ではないんですね。
しかも、システムに起因する事故や違反、目的地の誤りなどがあってはなりませんから、非常に精度の高い(容量の大きな)地図が必要になり、その地図がカバーしている範囲でしか、走らせることができません。すなわち完全自動運転車両は、シティコミューターとして社会インフラに組み込まれたシステムになるはずで、現在のクルマのような個人が所有する形態ではなくなると考えられているんですね。
ところが完全自動運転車両は、公共交通の発達した都市部ではなく、クルマでなければ移動できない距離を抱えた過疎地の高齢者の足としての需要も大切なわけで、そういうところにまで路車間通信などのインフラを整備したり、高精度マップを作ったりするのは費用対効果の面でどうなの? ということも考える必要が生じます。
というわけで、目的が渋滞や事故の削減、高齢者や障害者の移動の自由の確保などであるのなら、運転支援はレベル2ぐらいに止めておいて、福祉タクシーでも運行したほうが、トータルで見たら良いのではないかと思い始めております(^^;。
まあ何にしても、目的と手段を取り違えないことが大事だと思うんですが、どうも自動運転には、その匂いが漂い始めているような気がしてならない今日この頃です。





