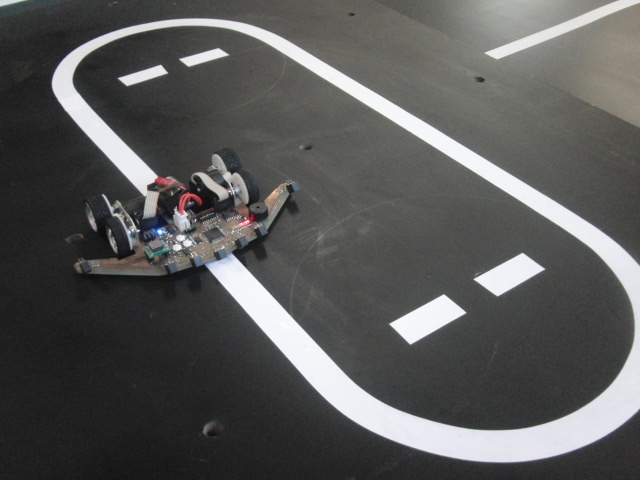
ロボトレーサの数値データ
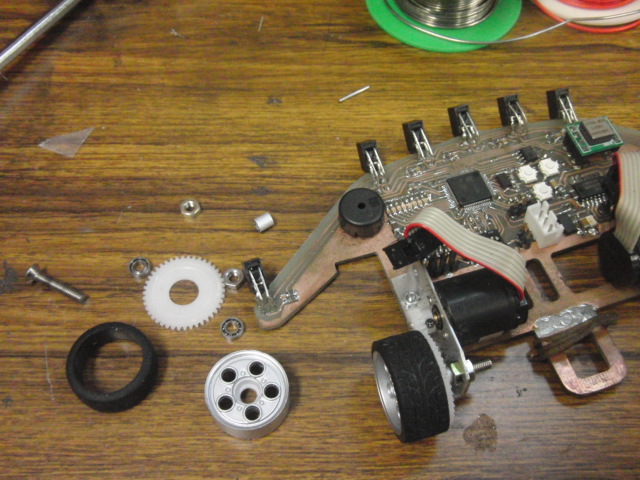
よく使われる構成を真似て,テキトーに入手できた部品を組み合わせて,テキトーにパラメータを加減して走らせていたので,数値データを聞かれても?だったのですが,調べてみました.前にちょっと書いたのデータの追記ですが,ロボットの寸法 縦:95(mm),横:150(mm),高さ:25(mm),重さ:105(g) CPUは,SH2-7125ジャイロは,Analog Devices adxrs610モーターは,Faulhaber 1717T06SR IE256 (6volt)ギヤ比は, 14:40(1:2.8)バッテリーは,リポ150mAh,2セル探索速度は,0.87m/s でターンの時だけ8%ほど落としてます.加速度は,3.3msR10ターン:約1.2m/s → 直線:2.3m/sでRに応じてなだらかに速度制御長い直線はトップスピード:設定は3.4m/sだけど距離が足りなくて途中で減速してそう.トップクラスのマウスと較べてスピード感がないので,どこが足りないのかと思って,Kiatさんのマウスデータと比較してみました.こちら↓https://sites.google.com/site/ngbengkiat/Downhome/Topic1/min7重量もモータもギヤ比もほぼ同じ,ターン速度は,マウスの方が最小Rが小さいのに同じ速度なのでもっとあげられるはずです.直線速度は同じレベルで走れていますが,加速度が決定的に足りてません.加速度はターンも直線も一定値で制御プログラムを組んでたので,安全に走れる値で設定していたのですが,加速度をコースに応じて最適化してやる必要がありそうです.ということですので頑張れ,来年の自分.それがクリアできてから新作だ.