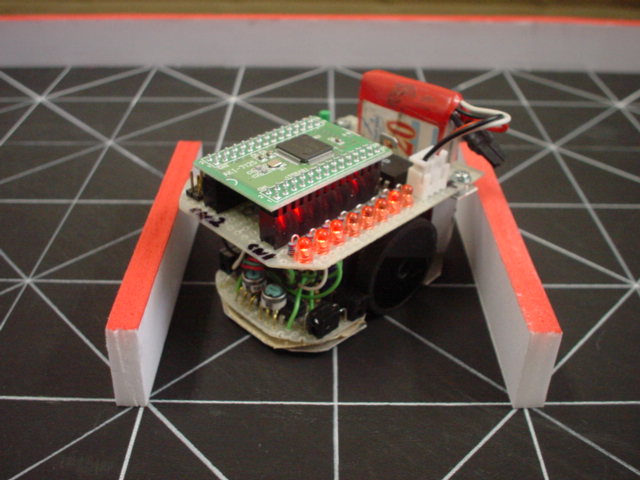
DCマウスの速度制御,その4
停止時はコキングの1コキ単位?で制御できるが,静止状態からの始動が不安定.始動時のみ例外処理として回り始めるまでパワーをかけると動作が少し安定になるが,スリップが起こりカウントと歩数が合わなくなる.じわっとパワーをかけて回そうとすると,タイミングが悪ければ1コキ前にパワーが落ちたときモータの逆転が起こってしまう.するとエンコーダが1相なのでカウントがおかしくなる.というわけで,この機体では,始動時のスリップは無視して走り始め,周囲の状態で補正をかけてみるしかなさそう.直進時は壁の切れ目で歩数の補正がかけられるが,90度や180度回転で周囲に壁がないときは補正をかける手段がない場合あり.多少斜めに区画に侵入しても柱を避ける走行でなんとかする手は考えられるが・・・