|
|
|
|
2017/02/18
テーマ:原発について考える(376)
カテゴリ:原発を考える
東電、調査用サソリ型ロボを見捨てる。
16日、東京電力は炉心付近の状況調査のため、サソリ型ロボットを福島2号機に投入! 自走式調査装置 通称「サソリ型ロボット」(東芝製)  尻尾の先端部にカメラが装着されていて、角度が変えられる。 ケーブルが繋がってて、いざとなったらこれをたぐり寄せて回収予定。 原発内部&作業イメージ  (画像クリックで拡大) ピンクの網掛け部分が格納容器の壁、ペデスタルって何か知らんが位置から考えて、 水色の網掛け部分が(たぶん)圧力容器側にある壁。 格納容器に穴を開け、ここからサソリちゃんを入れて… 一部拡大  格納容器から圧力容器下へのスロープを、サソリちゃんが移動していく手はず。 多分赤で囲ってある部分(これは東電の資料のまま)まで到達させる予定だったと思われ。 その距離、約7.2m だがしかし! テレ朝のニュースによれば、たった2m行った所で堆積物に乗り上げ前進できなくなり、ケーブルを切断して回収を断念したとある。 あわれ、サソリ型ロボ、見捨てられ…(T-T) それでも東電は「成功だった」と。 なにその強弁? また隠し事ですか? 動かなくなり止むなく回収を断念したような書き方だけど、これが何かおかしい。 東電の資料によると…… ・左側クローラベルトが動かなくなり前進する事ができなかった。 ・自走式調査装置は、今後の調査の支障とならないよう、ケーブルを切断し、CRDレール脇に残置した。 イメージ画像  (画像クリックで拡大) 画像をクリックして拡大して見てもらえばわかるけど、 サソリちゃんをスロープの始まり付近まで引き戻して、邪魔にならないよう脇に寄せるという芸当までやってるのだから、決して引っ掛かってたぐり寄せられなくなったわけじゃない。 やろうと思えば回収できたんじゃねぇの? と思いますが、どこにも回収しなかった理由は書かれてない。 よっぽど知られたくないのね。 Σ(ー'`ー ; ) ムカムカ 上手く行かないのは想像通りなので、今さらなんて事ないけど、 高価なサソリちゃんを見捨てた理由を隠してるのが、実にけしからんと思うのだった。 使用前と使用後 実はサソリちゃん投入に先立って、堆積物除去作業をやってるのだけど、これがまた変なのだった。  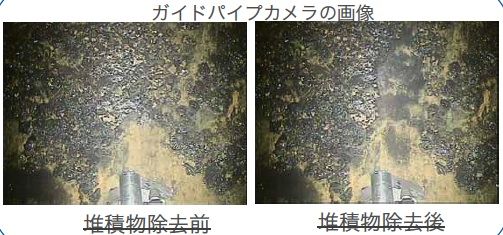   アタシには、使用前→使用後の違いが実感出来まへん。 東電は東電なりにさぁ、頑張ってるんだとは思いますよ。 ただね、方向性が間違ってると、頑張りも無駄になるよね。 誤摩化しを頑張るのは、空しくないのだろうか? ◆参考にした情報------------------ 福島2号機に投入のロボ “調査成功”も回収断念 1423.なんの成果も上げないまま、原発内に放置された自走式ロボット 東電公開PDF 2/9堆積物除去作業 http://www.tepco.co.jp/nu/fukushima-np/handouts/2017/images1/handouts_170209_08-j.pdf 東電公開PDF 2/16自走式調査装置による調査結果 http://www.tepco.co.jp/nu/fukushima-np/handouts/2017/images1/handouts_170216_11-j.pdf お気に入りの記事を「いいね!」で応援しよう
最終更新日
2017/02/18 02:41:07 PM
コメント(0) | コメントを書く
[原発を考える] カテゴリの最新記事
|










 世の中 本音と建て前ばかり@
世の中 本音と建て前ばかり@



