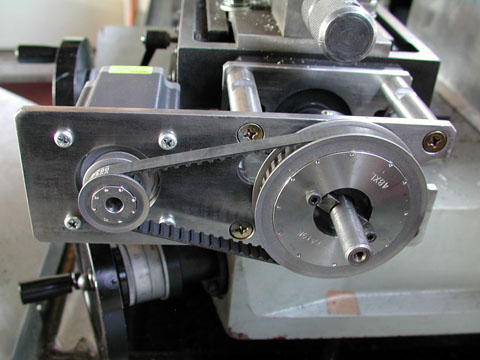
プーリーは XL037
ドライブ16T:ドリブン48T=1:3

アルミ製の特徴は必要ないので、何かと融通の利く鉄製を使う。

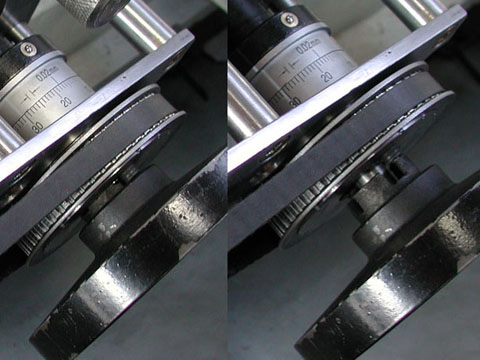
プーリーそれぞれの軸穴を取付軸に合わせて加工し、
止めネジの細工をして、ドリブン側はボス部をすべて削ってから、
都合のいいサイズのスペーサーを作った。

ハンドルクラッチ部の空きスペースを、プーリーが丁度埋める形になる。

プーリーにフランジを取付け、
モーターブラケットの取付ボルトをゆるめ、スライドさせてベルトを張る。
これは、加工が楽な二つ穴のベース取付部を使った為だったが、
出来上がってみると、ベルト張りの作業性は良くなかった。
後の成り行きで、何度もモーターを脱着することになり、
やはりモーター取付穴4つを長穴にするべきだったと思った。
が、直さずそのままw
いつか、することが無くなった時にやりまひょうw

ハンドルをスポン!と取りつけて出来あがり。
 押し込んで、クラッチ、オン 引き離して、オフ
押し込んで、クラッチ、オン 引き離して、オフ
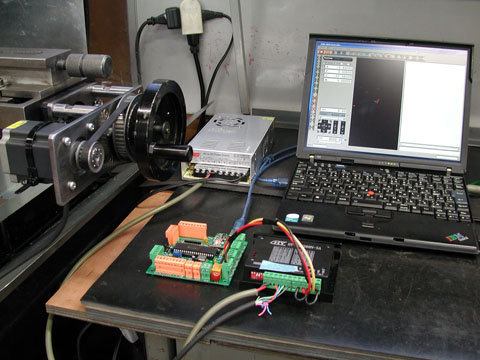
予定していた24v電源を入手して、いざ動作テスト。
モータードライバーのディップスイッチの組み合わせによる、
ステッピングと電流の設定に加え、ソフト側の各設定項目が沢山ある。
その組み合わせは、実際の加工を伴わないと簡単に決まるものでもない。
しかし、ハンドルを温存したので、手で押さえて疑似的に負荷をかけることができ、
ドライバーの電流設定など、体感的に分かりやすかった。
各設定項目を弄り回し、ワークなし空走状態での設定値を、
試行錯誤する日々が続きましたとさw